[Arduino] Linefollower with photoresistors
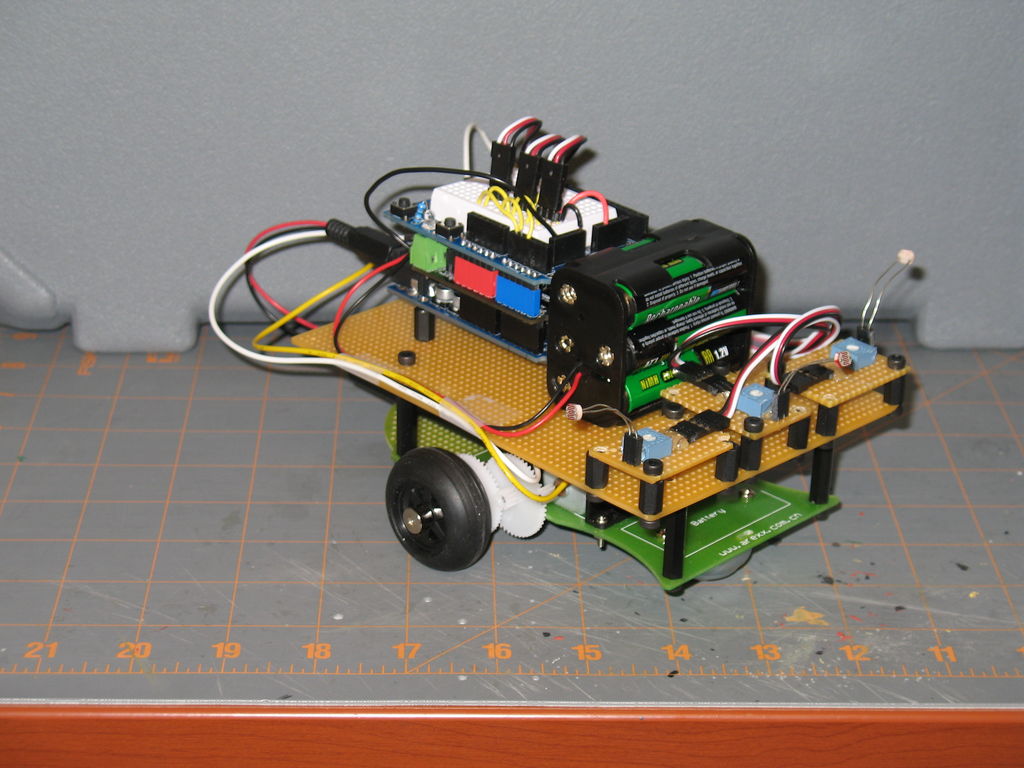
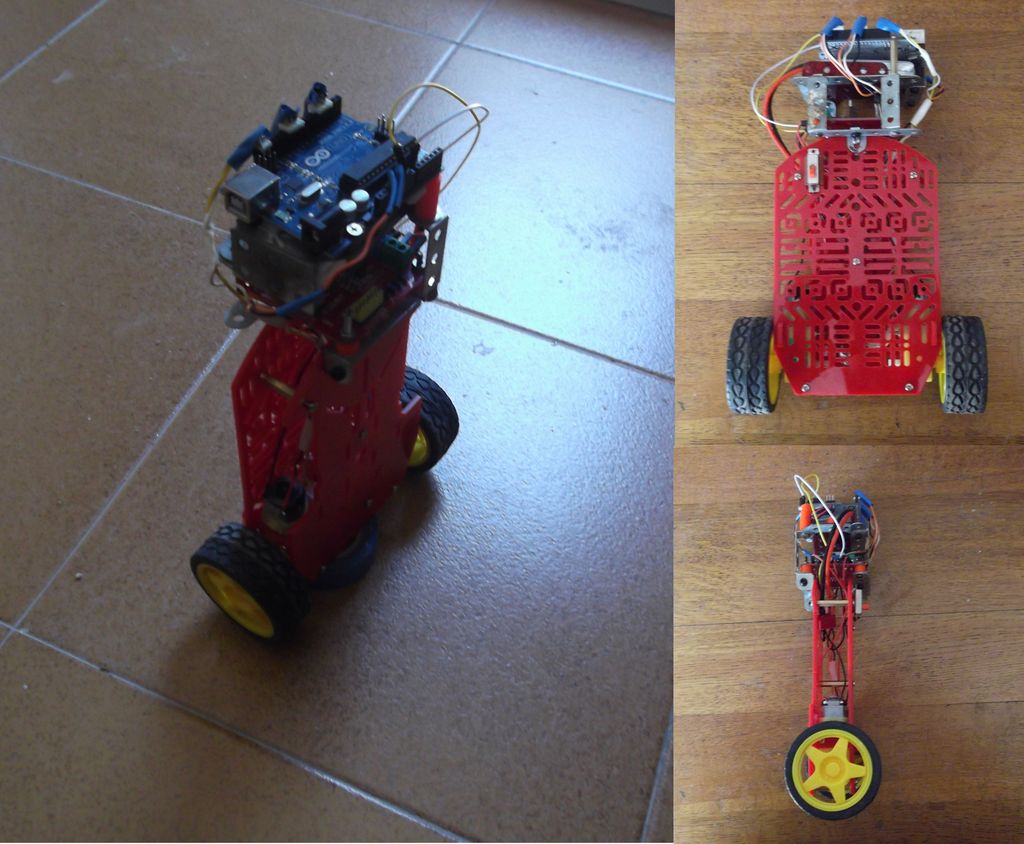
I built a linefollower robot that could be used in many different ways, and I summed up my project in some steps. To begin with, all you need is the following parts: Step 1: Robot frame Parts List: -Robot frame -Two wheels -Two DC motors How to: I used an old robot frame with two […]
[Arduino] Linefollower with photoresistors Continue Reading