This gesture controlled robot uses Arduino,ADXL335 accelerometer and RF transmitter-receiver pair.
We will divide the entire robot into 3 parts the transmitter,the receiver and the robot.
The different gestures that have been mapped to the direction of the bot are-
Hand parallel to the ground-stationary
Hand tilted forward-forward
Hand tilted backward-backward
Hand tilted right-right
Hand tilted left-left
I’ve made the transmitter on thermocol though it can also be made on a glove.
Step 1: Materials required
For transmitter-
- Arduino Uno
- ADXL335 accelerometer
- 433 MHz RF transmitter
- Breadboard
For receiver and robot-
- Arduino Uno
- 433 MHz RF receiver
- L293D motor driver IC
- Chassis and wheels
- 2 DC motors
- Breadboard
Of course you will also need jumper wires and 9V batteries
Instead of using the Arduino and breadboard in transmitter like I did ,you may instead use an ATMega328p, which can be programmed from the Arduino board and solder it along with RF transmitter and ADXL335 on a perfboard.
The perfboard can then be attached to a glove.However here I’ve used a remote controller like setup with the gestures the same
Step 2: Assembling the robot
Fix the wheels on the chassis.
Mount the DC motors on the back wheels and use dummy wheels for the front.
Mount the L293D IC on the breadboard and place it on the chassis
Place the Arduino on the chassis and make the connections of L293D as follows
4,5,12,13 to GND
1,9,16 to VCC(5V)
3,6 to left motor(output)
11,14 to right motor(output)
2,7,10,15 to pins 8,9,10,7 of Arduino(inputs)
8 to 9V battery
Step 3: Determining the direction of robot
You can learn more about L293D from internet.
Basically ,the motor rotates when the inputs supplied are opposite.
For example high,low may rotate the motor in clockwise while low,high in anti clockwise.
If both inputs are same then motor does not rotate.
The following sketch will help to determine for what inputs for the 2 motors will the robot move forward.Copy and paste it in Arduino IDE
int lm=9;//pin 9 of arduino to pin 7 of ic
int lmr=8;//pin 8 of arduino to pin 2 of ic
int rm=10;//pin 10 of arduino to pin 10 of ic
int rmr=7;//pin 7 of arduino to pin 15 of ic
//+ve of lm to pin 6,-ve to pin 3 //+ve of rm to pin 11,-ve to pin 14
void setup()
{ pinMode(lm,OUTPUT);
pinMode(lmr,OUTPUT);
pinMode(rm,OUTPUT);
pinMode(rmr,OUTPUT); }
void loop()
{ digitalWrite(lm,LOW); //both move forward
digitalWrite(lmr,HIGH);
digitalWrite(rm,HIGH);
digitalWrite(rmr,LOW); }
In my case it was observed that the bot will move forward pin 9 of Arduino is high,pin 8 is low(for left motor),pin 10 is high,pin 7 is low(for right motor).Try different combinations till you get desired direction. Similarly for moving back the combination is high,low,low,high.The bot will go right if left motor is moving and right is stopped by giving same inputs.Similarly for left.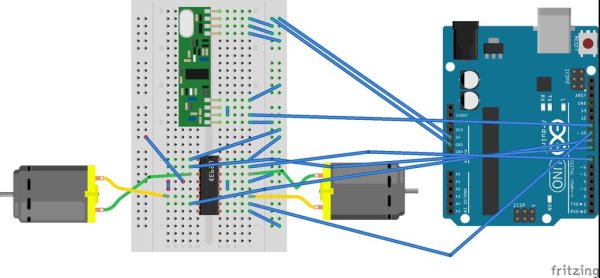
Step 4: Interfacing ADXL335 with Arduino
Mount the ADXL335 and on the breadboard.
The connections to Arduino should be as follows.The Arduino should be different from the one used in step 2
ADXL335 ARDUINO
VCC 3.3 V
GND GND
X A0
Y A1
Z open
ST open
Now copy and paste the code and determine the threshold values for different gestures.
The code gives 2 values xval and yval which will have unique values for different gestures.
Determine the range of values of xval and yval when the hand is tilted forward,backward etc.
For more detail: Gesture controlled robot using Arduino