Toys are great for keeping the kids amused at play time, but oftentimes its difficult to get them to understand the importance of tidying up after themselves. It would naturally be ideal to have some manner of robot to help in this regard, and [Paco Garcia] might just be leading the charge in this area.
[Paco]’s project involves combining a robotic arm with computer vision tools in order to allow it to pick and place small objects – in this example, toys.
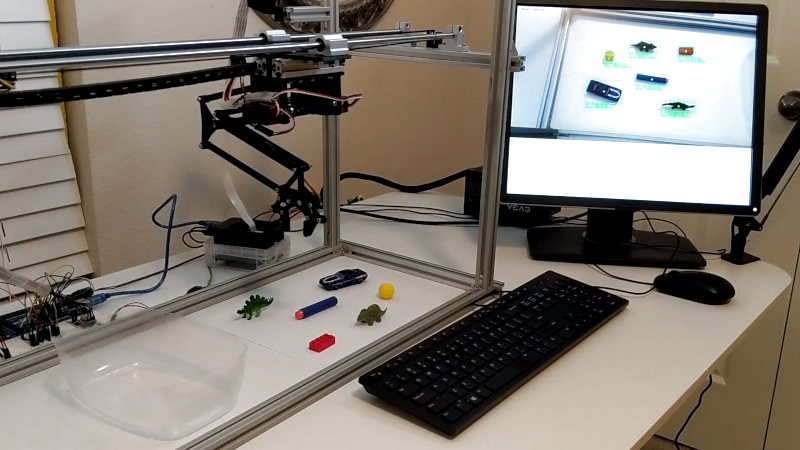
The robot arm is of a gantry type, built on an aluminium frame with 3D printed components. The computer vision side of things is handled by a Raspberry Pi, fitted with the standard camera and running OpenCV software for object recognition. This then passes commands to an Arduino which runs the stepper motors controlling the arm.
[Paco] notes that the hardest part of the build was learning how to generate real-world coordinates from a single camera feed in OpenCV. With that mastered, the rest of the dominoes began to fall. With trigonometry and kinematics knowledge in hand, the robot has grown capable of reliably picking and placing small objects across its range of motion. Future work aims to improve the robot’s abilities to rotate and otherwise manipulate its end effector for more versatility.
Naturally, we typically see pick and place machines used for PCB production – and this build is no exception. Video after the break.
Source: PICK AND PLACE FOR TOYS