Summary of Mastering Motor Control: 6 Innovative Arduino Projects
Choosing the Right Arduino Motor guides selection among servo, DC brushed, stepper, and brushless motors, explaining operation, control methods, pros/cons, and key selection parameters (torque, voltage/RPM, current). It highlights trade-offs for battery-powered vs. mains projects, use of drivers/encoders, and practical examples like an internet-connected pet feeder using a single servo for simple dispensing tasks.
Parts used in the Arduino Motor Project:
- Arduino (microcontroller)
- Servo motor
- Motor driver or amplifier (for other motor types)
- DC brushed motor (as a motor type reference)
- DC brushless motor (as a motor type reference)
- Stepper motor (as a motor type reference)
- Wheel encoder or rotary encoder
- Hall effect sensors (for brushless motor control)
- Power source (battery or wall outlet)
- Gearbox (optional for torque regulation)
Choosing the Right Arduino Motor
In this guide on Arduino motors, we’ll delve into fundamental details essential for selecting the right motor for your specific project. If you’ve been immersed in the realm of DIY electronics for some time, feeling assured of your skills, you might be seeking a greater challenge and a more fulfilling outcome by engaging in larger, more intricate innovations. Among the realm of advanced constructions, motor-oriented inventions like Arduino-based robots frequently stand out as highly favored, and for valid reasons—they possess an undeniable allure!
There exists a wide array of Arduino motors, each with its unique advantages and limitations. Consequently, not every motor suits every task perfectly; some excel in specific areas while falling short in others. In our discussion today, we’ll closely examine several electric motor types commonly encountered in electronics shopping. We’ll also provide insights on how, when, and where to utilize a specific motor, ensuring you always possess the appropriate equipment tailored to the demands of your new motorized project.
Moreover, to fuel your creativity, we’ll showcase a glimpse of motorized creations we’ve developed, highlighting the functionality of the motors under scrutiny. If you’re an aspiring creator seeking comprehensive knowledge about Arduino motor systems to elevate your projects, you’ve certainly landed in the right spot.
Arduino Motor Types
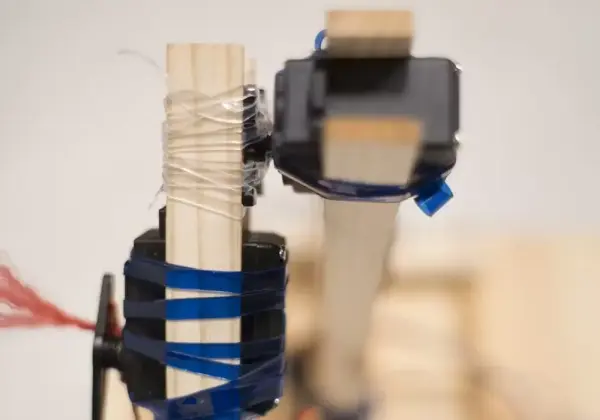
Servo Motors
Servo motors stand out as a favored choice among hobbyists engaged in Arduino projects, primarily for their versatile functionality in motor applications. Their popularity stems from their adaptability and varied usage scenarios.
In essence, a servo motor integrates a conventional DC motor alongside a position feedback sensor and a compact control board. This amalgamation facilitates effortless motor manipulation directly via an Arduino, utilizing a PWM (Pulse Width Modulation) signal. This plug-and-play feature enables immediate control of the motor’s actions.
Hobbyists widely prefer servo motors due to their broad applicability, extending beyond recreational use to pervasive integration across diverse industries. In the realm of robotics, in particular, servo motors excel, showcasing exceptional proficiency in delivering precise motor control for robotic appendages. Moreover, they play a pivotal role in the development of mechanized prosthetics, effectively enhancing the lives of amputees through finely-tuned motor functionalities.

How it works
In broad terms, a servo motor can function as either a linear or rotary actuator, enabling precise control over either straight-line or angular movements. Contrary to being a standalone motor variant, it actually integrates a motor, control circuitry, and a positional feedback sensor into a unified operational entity.
Servo motor control
Although certain servos function via analog signals, the prevalent ones accessible in hobbyist markets predominantly operate through PWM (Pulse Width Modulation) control, specifically tailored for compatibility with microcontrollers. Utilizing a motor driver or amplifier, the Arduino, functioning as the indexer within the control circuit, dictates the sequence and timing of electrical signals transmitted to the motor through the amplifier.
Pros
Servo motors exhibit exceptional versatility, boasting straightforward programmability and control through digital output. Renowned for their precision, although not universally consistent across all models, they stand out for their capacity to operate without necessitating intricate control loop computations.
Available in a multitude of variants, servo motors offer expanded functionalities that enable enhanced rotational control, catering to a diverse array of specific application needs.
Cons
Significant power consumption characterizes servo motors, often leading to higher price tags compared to basic motor models. Owing to their widespread demand and associated expenses, numerous servo motor options equipped with plastic gearing are accessible at comparatively reduced costs. However, these variants are ill-suited for managing heavy loads or prolonged operational periods, often susceptible to gradual stripping (resulting in toothlessness) over time.
DC Motors
Despite its slightly outdated nature, the conventional Direct Current (DC) brushed motor remains exceedingly simplistic in design. It boasts ease of assembly and cost-effectiveness, making it a ubiquitous choice across a wide spectrum of applications requiring electric motors.
How it works
The DC brushed motor comprises an arrangement of an uneven count of conductive windings encircling a central axle connected to the commutator. Surrounding this setup are two magnets with opposing polarities. Energizing the windings induces a charge, prompting them to be drawn toward the outer assembly, thereby initiating rotation.
The interaction changes as the brushes make contact with the commutator, modifying the charge. This adjustment enables the windings to sustain attraction toward the outer assembly, ensuring continuous motor rotation as long as a power source is supplied.

DC motor control
As anticipated, the control of simple motors is straightforward. Adjusting the motor’s rotational speed (measured in RPMs) or torque involves increasing voltage or amperage, respectively, in terms of power. Reversing the motor’s direction merely requires a straightforward polarity reversal of the motor contacts.
For achieving the heightened precision demanded in contemporary applications, pairing DC brushed motors with a wheel encoder or rotary encoder is a viable solution. These devices possess the capability to detect and interpret the angular position of a motor’s axle. Subsequently, the microcontroller translates the output signal into digital information. This data proves instrumental in determining the motor’s location, speed, and acceleration to meet specific operational requirements.
Pros
Considerable torque capabilities, uncomplicated assembly procedures, and straightforward controllability characterize these components.
Manufacturing them incurs remarkably low costs.
Cons
Brush wear diminishes the motor’s longevity over time.
Operating consistently at higher RPM levels may lead to brush heating and potential motor damage.
Minimal electromagnetic interference can disrupt radio frequencies.
Closed-loop control requires increased computational demands due to these interferences.
Start a DC Motor Circuit
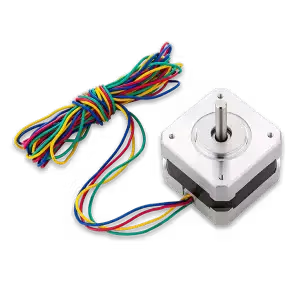
Stepper Motor
An iteration of the traditional DC motor, the stepper motor emerges as the preferred option for tasks demanding highly controlled and precise movements, surpassing the capabilities of standard motors. Widely employed within the printing sector and integrated into uncomplicated robotic systems like factory robot arms designed for specialized operations, they excel in delivering meticulous and tightly regulated motions.
How does this motor work
Contrary to motors geared for continuous rotation, stepper motors are engineered to execute a defined number of steps at a specific speed upon activation. Each instance of powering the motor facilitates one step, determining the precision of the motor by the size of each individual step taken.
Stepper motor control
Distinct from other motor categories, the stepper motor necessitates advanced electronic setups to fully exploit its capacity for precise motor control. Consequently, employing a stepper motor involves integrating a driver circuit that establishes a connection between the motor and a controlling system, such as an Arduino, tasked with managing and regulating the power supplied to the motor.
Pros
- Extremely high precision control over the operation
- Simplicity of construction and reliability
- High torque – not all
- Open loop control
Cons
- Highly specialized usage
- Requires advanced control system for proper operation
Brushless Motor
Derived from the brushed motor, brushless motors are swiftly gaining favor among hobbyists and enthusiasts due to their remarkable potential and heightened dependability in comparison to their predecessors. Similar to brushed motors, they deliver substantial torque and maintain reliable performance even at high revolutions per minute (RPM). This versatility renders the brushless motor highly adaptable, making it a preferred choice as an Arduino motor, especially sought after by individuals constructing RC cars or drones.
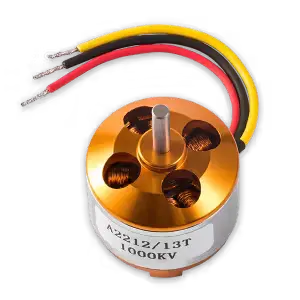
How it works
The brushless motor operates by employing alternating current to generate opposing charges between the windings and the magnets situated on the external assembly. In this specific design, solely the external assembly affixed to the axle undergoes rotation. The advantage of featuring just a single moving component, coupled with the absence of contact brushes, results in several benefits for brushless motors. These advantages encompass heightened energy efficiency, extended operational longevity, seamless transmission of mechanical energy to the axle, and minimized friction.
Brushless motor control
Despite being more challenging to manage compared to basic brushed motors, advancements in modern technology have significantly simplified the control of brushless motors through computer interfaces. These motors commonly integrate Hall effect sensors, capable of detecting alterations in magnetic fields and converting these changes into digital data. Similar to how wheel encoders are employed with brushed motors, these sensors serve the purpose of monitoring and regulating the output of brushless motors.
Pros
- Long lifespan
- Single moving part provides high reliability
- Low friction construction advantageous for extended operation at high speed
- Energy efficiency
Cons
- Requires specialized control systems
- For optimal motor usage, requires the use of a gearbox regulate power delivery
Parameters for choosing an Arduino motor
Selecting the appropriate motor for your project typically hinges on the specific nature of the project itself and the performance criteria that define the optimal motor choice. Three primary parameters, interdependent in nature, necessitate consideration when identifying the suitable motor for our project.
Torque
While this article doesn’t delve deeply into intricate mathematics and physics, comprehending the torque rating of your motor and its impact on your project’s selection process remains crucial. This understanding ensures the adequate choice of a motor that aligns with your specific needs or expectations.
In simple terms, a motor’s torque rating signifies the rotational force it can exert on a load. This value is calculated using a straightforward formula:
Torque = Distance from the axis of rotation × Force
To illustrate how torque influences creations, consider its significance in another domain where it plays a vital role: the automotive industry. In scenarios like ascending hills or steep roads, an engine boasting a high torque rating becomes preferable. This attribute enables the application of greater force to the load (the vehicle), enabling it to ascend the hill even at low speeds or from a standstill.
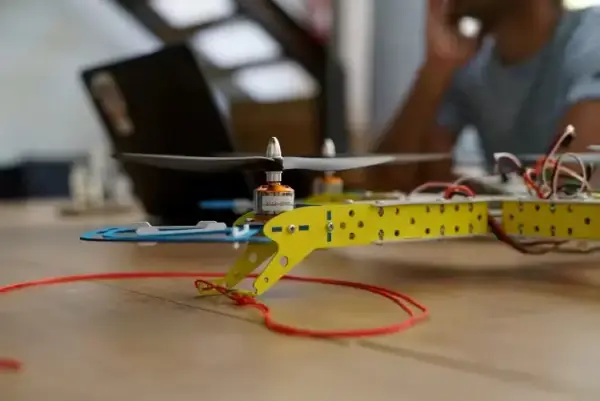
Maintaining a high rotational motor speed, especially in applications like drones, heavily relies on a motor’s high torque rating. This attribute allows the motor to swiftly alter RPM (revolutions per minute), resulting in smoother and more responsive performance, particularly in electric vehicles leveraging such motors.
For those seeking high torque motors, there are viable options to consider. The standard DC brushed motors, although cost-effective, tend to have a shorter lifespan and require more frequent maintenance. Conversely, the DC brushless motors, while pricier, offer greater reliability and energy efficiency.
It’s crucial to align your motor’s torque rating with the specific requirements of your creation to ensure prolonged functionality. Inadequate torque might render your creation inoperable, while excessively high torque could subject the system to mechanical stress during operation. Although catastrophic failures due to overly high torque in DIY electronics are rare, they can hasten parts’ wear and tear, thereby shortening the overall lifespan of your invention.
Voltage – Velocity/RPM
In this context, velocity pertains to the electric motor’s rotational speed, measured in revolutions per minute (RPM). Together with torque, these factors significantly impact motor performance. Simplistically put, a motor with high torque excels in moving heavier loads at a slower pace, whereas a high RPM drive system allows for swifter speeds at the cost of reduced load-carrying capacity.
When integrating an Arduino motor into a project, it’s vital to consider the power source—whether from a wall outlet or batteries—and ensure that the motor’s voltage requirements are met to optimize its performance.
For adept builders, employing a gearbox—akin to those in conventional automobiles—empowers motors to function effectively across varying demands. Analogous to driving a car, lower gears provide substantial torque for initial movement, necessitating swift transitions to higher gears for sustained acceleration. Attempting to move from a standstill in a high gear, like 4th or 5th in a manual transmission, demonstrates how high RPMs without ample torque or kinetic momentum impede rapid progress.
Broadly speaking, a brushless motor presents an appealing choice for individuals seeking reasonable torque, reliability, and energy efficiency even at higher RPMs. This option appeals to those uninterested in managing the weight and intricacy associated with a gearbox.
Current/Amperage
When selecting an electric motor, it’s crucial to find one capable of delivering the required power while staying within acceptable power consumption limits. The power, measured in watts, is calculated as the product of volts and amps. Voltage influences a motor’s RPM (Revolutions Per Minute), while higher amp ratings are essential for boosting torque. However, opting for a potent motor operating at high voltage and amps results in increased power demands.
While this might not pose issues for projects relying on wall sockets for power, portable endeavors like unmanned vehicles, robots, and wearables need to consider the motor’s demands. The batteries fueling these projects must be configured to meet the necessary power output. Hence, prioritizing smaller, lighter, and more efficient motors is favored in the development of portable electronics. This approach minimizes both power consumption and the weight of the motor and its required power source.
Choosing the right motor involves several other considerations, but comprehending these three primary criteria is instrumental in guiding your decision-making. While almost any electric motor can theoretically be adapted for various functions with ingenuity, you now possess the knowledge needed to select the most suitable motor(s) for your project.
In the following section, we’ll explore practical applications of the previously discussed motor types through a few projects crafted by our team here at circuito.io.
Arduino Motor project examples
Here at circuito.io, we’re continually working on intriguing projects. In this segment, we aim to spotlight select Arduino motor projects that leverage diverse motor types, demonstrating the unique capabilities of each.
Every project title is associated with its respective project page. These pages offer insights into controlling different types of motors. Additionally, they provide access to our builder tool, allowing you to modify our showcased projects or create your own effortlessly from scratch.
Arduino Motor Project
The internet-connected pet feeder presented an ideal scenario for employing a single servo motor due to the limited rotational range necessary for dispensing food. Utilizing the servo motor in this context emerged as a cost-effective, space-efficient, and user-friendly solution. It required no supplementary components to operate, demanded only minimal power input, and demonstrated reliability for prolonged periods of use.

- What motor was used in the internet-connected pet feeder project?
The pet feeder used a single servo motor. - Can I control a servo motor directly with an Arduino?
Yes, servo motors can be controlled directly with an Arduino using a PWM signal. - How does a DC brushed motor change direction?
Reversing the motor's direction is done by reversing the polarity of the motor contacts. - Do stepper motors require special electronics?
Yes, stepper motors require a driver circuit and advanced electronic setup to control their precise steps. - What advantage do brushless motors have over brushed ones?
Brushless motors offer longer lifespan, higher efficiency, lower friction, and higher reliability due to no brushes and a single moving part. - How does torque affect motor selection?
Torque determines the rotational force a motor can apply; choose torque to match load needs to avoid underperformance or excessive mechanical stress. - Does motor voltage affect speed?
Yes, motor voltage influences rotational speed (RPM). - Why consider current or amperage when choosing a motor?
Amperage affects torque and overall power consumption; for battery-powered projects, lower power draw and lighter motors are preferred. - Are servo motors suitable for high-load continuous use?
Many affordable servo motors use plastic gearing and are not suited for heavy loads or prolonged continuous operation. - Can encoders be used with DC motors for precision?
Yes, wheel encoders or rotary encoders can be paired with DC motors to measure position, speed, and acceleration for precise control.