Parol 6 is a 3D-printed six-axis robot arm created by [Petar Crnjak] as a combination of the principles from a few previous projects. Aside from a pneumatic gripper, each axis is driven by a stepper motor, with at least a few of these axes being driven through a metal planetary gearbox for extra precision and torque.
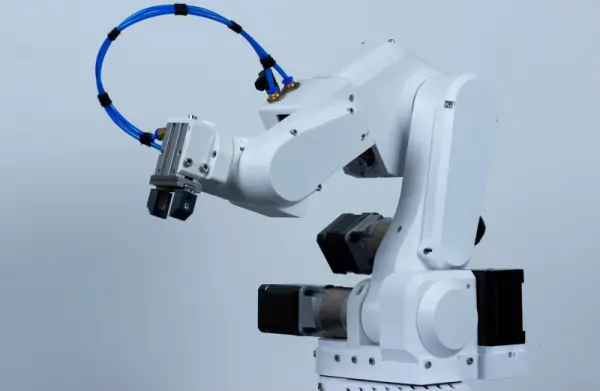
From what we can glean from the work-in-progress documentation, there are some belt drives on four of the relevant axes and a mix of NEMA17 format steppers driving either 20:1 or 10:1 reduction boxes. There appears to be a mix of inductive sensors and traditional microswitches used, but it’s not so easy to work out where these are placed.
The controller PCB is a custom design based around the STM32F446 microcontroller, with modular drop-in boards for driving the motors, using the Trinamic TMC2209 for super smooth and quiet motion. The KiCAD project seems to be missing at the moment, with only gerbers and BoM for reference, but we expect that to appear at some point. There are some RS485 drivers on there, which is a sensible addition to providing an isolated interface if correctly implemented. There isn’t much detail on the electronics yet, but it all looks pretty standard fayre. The software stack looks like Arduino with a smattering of STM324xx HAL being used directly. The standard AccelStepper library is used, which is a good choice as it’s quite mature.
From the video logs in the project page, the robot looks complete, with some pretty good repeatability numbers, but we would like to see some data on absolute positioning accuracy as well, that said it’s a great project with an active Discord behind it, so let’s see how this develops.
Source: HACKADAY PRIZE 2023: PAROL6 – A GPL DESKTOP ROBOTIC ARM