Summary of DIY Arduino Motor Shield
This article details a low-cost DIY Arduino motor shield that closely replicates the original Arduino motor shield using an L298N motor driver chip. It controls two motors using four PWM pins and employs eight 1N4937 fast recovery diodes for rapid motor braking, ideal for robotics competitions. The project offers full schematics, datasheets, PCB layouts, and test files. Operating at 5-50V and 2-4A, it supports movements like forward, backward, left, and right. The custom PCB was designed using Fritzing, encouraging users to follow a six-step assembly guide.
Parts used in the Arduino Motor Shield Project:
- L298N Motor Driver Chip
- 7806 Regulator Chip (or substitutes 7805-7809)
- 1N4937 Fast Recovery Diode (or substitutes 1N4007 or 4148)
- 1 Ohm ¼ watt Resistor (or substitutes up to 10 Ohms)
- Screw Terminal Blocks
- PCB Board (Regular or Photo-positive)
- Male or Female Pins (for Arduino connection)
- Heatsink (bought or DIY)
Today, I’m going to show you how to make an Arduino motor shield (driver) at a low cost. It works splendidly, its posses almost all the characteristics of the original Arduino motor shield. It’s almost considered as a clone. The original Arduino motor shield has the same motor driver chip (L298), the only difference with it, is the package type, my project contains the vertical version of the chip L298 (with a “N”).

Structure:
It’s controlled using 4 PWM pins. The connections are: 11&10 for the R-Motor and 6&5 for the L-Motor. With the help of eight fast recovery diodes (1N4937) it shows a very fast response of stopping/ braking, that’s why I’m going to use it for the national SUMOBOT competition.
What Is A Motor Shield?
A motor shield is a circuit that drives different loads such as motors, lights and etc… The Arduino Board (Microcontroller) itself isn’t designed to operate high current loads, that’s why we use motor shields, it is a circuit that is controlled by your arduino board to drive high power accessories.
Cost:
It only cost me P363.75 (Converted: $8.87)! The prices would decrease to P262.50 (Converted: $6.40) if I sticked to the original plan, since it’s for competitional purposes, I substituted some parts with a higher rate of response.
About The Guide:
The guide includes the datasheet, schematic diagram, PCB layout, Arduino test files and etc…. All you need is an hour and the 6 step instructable.
Specs:
____________________________________________________
Voltage Range: 5- 50 volts
Current Range: 2-4 Amperes
Power: 25w @75°C
Working Temparature: -40°C to 150°C
Board Compatibility: Arduino Uno
Motor Outputs: 2 Motors (Left & Right)
Possible Robot Movements: Left, Right, Forward, Backward & etc..
PWM Pins: [12&11] [6&5]
The PCB layout is my original design, it was created using Fritzing Software, please ask for permission if anyone is willing to modify and republish it.
Step 1: Parts & Materials
I bought my parts in ALEXAN, a local electronic store with tons of branches (Only Found In The Philippines). Everything is cheap there, the links that I gave is only an alternative for online purchases. My real price list and spending is a lot different and cheaper. If you live in the Philippines, you can buy in DEECO, Alexan, E-Gizmo or Raon.
Parts:
– L298N Motor Driver Chip
– 7806 Regulator Chip
– 1N4937 Fast Recovery Diode
– 1 Ohm ¼ watt Resistor
– Screw Terminal Blocks
– PCB Board (Regular or Photo-positive)
– Male or Female Pins (Used to connect to Arduino)
– Heatsink (Bought or DIY)
7806 Regulator Chip = (Substitute: 7805- 7809)
1 Ohm ¼ watt Resistor = (Substitute: Up to 10 Ohms)
1N4937 Fast Recovery Diode = (Substitute: 1N4007 or 4148)
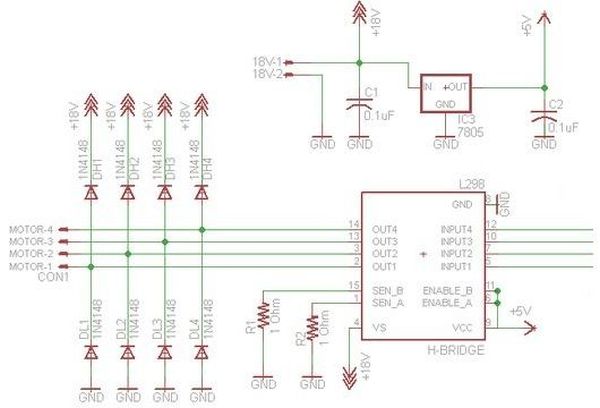
Step 2: PCB Making
In this step, I will show you the schematic diagrams, datasheets and PCB layouts. Just download the files below. If you don’t know how to make a PCB, please visit my other instructable guide “DIY Customized Circuit Board (PCB Making)“. I used a Photo-postive PCB board instead of the traditional toner transfer. The photo-postive PCB is a bit rare in the U.S. that’s why some should stick with the toner transfer method. Also don’t forget to drill holes on them :)))
In making the photo-positive PCB, it’s better to stay in a dark area and have a 10W fluorescent lamp beside you, also use a kitchen timer to set a 5 minute alarm for counting the exposure time.
– 7806 Regulator Chip
– 1N4937 Fast Recovery Diode
– 1 Ohm ¼ watt Resistor
– Screw Terminal Blocks
– PCB Board (Regular or Photo-positive)
– Male or Female Pins (Used to connect to Arduino)
– Heatsink (Bought or DIY)7806 Regulator Chip = (Substitute: 7805- 7809)
1 Ohm ¼ watt Resistor = (Substitute: Up to 10 Ohms)
1N4937 Fast Recovery Diode = (Substitute: 1N4007 or 4148)