This sketch is used by Exercise: Servo Sweep.
Full Source Code
The full code is all in one file ServoSweep.ino.
// ServoSweep - move a servo along trajectories
//
// Copyright (c) 2016, Garth Zeglin. All rights reserved. Licensed under the
// terms of the BSD 3-clause license as included in LICENSE.
//
// This program assumes that:
//
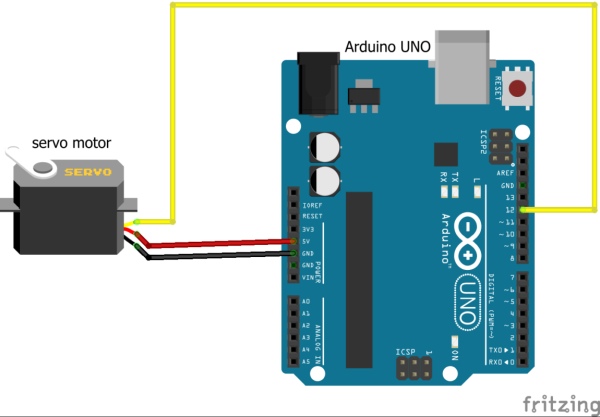
// 1. A small hobby servo is connected to pin 9.
// Note: this sensor has +5V digital outputs can connect directly to the
// digital input pins on the Arduino UNO.
//
// 2. The serial console on the Arduino IDE is set to 9600 baud communications speed.
//
// ================================================================================
// Import libraries.
#include <Servo.h>
// ================================================================================
// Definitions of constant values.
// The wiring assignment.
const int SERVO_PIN = 9;
// ================================================================================
// Global variable declarations.
// Create an object to control the servo by declaring it. The Servo C++ class
// is defined in the Servo library.
Servo wiggling_servo;
// Declaration for the subroutine function defined below. Normally the Arduino system
// doesn't require forward declarations, but the optional argument defeats it.
void linear_move(int start, int end, float speed = 60.0);
// ================================================================================
// Configure the hardware once after booting up. This runs once after pressing
// reset or powering up the board.
void setup()
{
// Initialize the serial UART at 9600 bits per second.
Serial.begin(9600);
// Initialize the Servo object to use the given pin for output.
wiggling_servo.attach(SERVO_PIN);
}
// ================================================================================
// Run one iteration of the main event loop. The Arduino system will call this
// function over and over forever.
void loop()
{
//================================================================
// Movement template 1: perform several uncontrolled movements at maximum speed.
for (int i = 0; i < 2; i = i+1) {
wiggling_servo.write(0);
delay(500);
wiggling_servo.write(90);
delay(500);
wiggling_servo.write(180);
delay(500);
wiggling_servo.write(0);
delay(500);
}
//================================================================
// Movement template 2: loop over angles to create a series of stepped movements.
for (int i = 0; i < 180; i += 10) {
wiggling_servo.write(i);
delay(500);
}
//================================================================
// Movement template 3: sweep back and forth a few times using a subroutine
// which produces a smooth sweep.
for (int i = 0; i < 2; i = i+1) {
// Call the movement function defined in the code below.
linear_move(0, 180);
linear_move(180, 0);
}
linear_move(0, 45); // move to the start point
// Similar, but using different angles and a slower speed.
for (int i = 0; i < 2; i = i+1) {
linear_move(45, 135, 30);
linear_move(135, 45, 30);
}
linear_move(45, 90); // move to the center
//================================================================
// Movement template 4: generate a movement profile using a mathematical function.
// Perform a smooth movement around the center several times.
for (int i = 0; i < 4; i = i+1) {
// Define a few constants governing the motion. Note that this example
// uses a C++ style of declaration which looks more like a normal variable
// declaration, but whose value cannot be changed.
const float center = 90.0; // in degrees
const float magnitude = 30.0; // in degrees
const float period = 4.0; // in seconds, duration of cycle
const float interval = 0.020; // in seconds, duration of each step
int cycle_steps = period / interval;
for (int step = 0; step < cycle_steps; step++) {
// Compute the 'phase angle' for the sine function. Note that the sin()
// function requires an angle in radians.
float phase = step * (2*M_PI/cycle_steps);
// Compute the angle to send to the servo.
float angle = center + magnitude * sin(phase);
wiggling_servo.write(angle);
// Wait for one sampling period.
delay(1000*interval);
}
}
}
// ================================================================================
// Subroutine definitions.
// Linear servo movement function. This will step from the start angle to the
// end angle as requested. This emits servo updates at a constant rate. It
// does not return until the movement is complete.
//
// start - angle in degrees
// end - angle in degrees
// speed - optional argument, speed in degrees/sec
//
void linear_move(int start, int end, float speed)
{
// Specify the number of milliseconds to wait between updates.
const int interval = 20;
// Compute the size of each step in degrees. Note the use of float to capture
// fractional precision. The constant converts speed units from milliseconds
// to seconds: deg/step = (deg/sec) * (sec/msec) * (msec/step)
float step = speed * 0.001 * interval;
// Declare a float variable to hold the current servo angle.
float angle = start;
// Begin a do-loop. This always executes the body at least once, and then
// iterates if the while condition is met.
do {
wiggling_servo.write(angle); // update the servo output
delay(interval); // pause for the sampling interval
if (end >= start) {
angle += step; // movement in the positive direction
if (angle > end) angle = end;
} else {
angle -= step; // movement in the negative direction
if (angle < end) angle = end;
}
} while (angle != end);
// Update the servo with the exact endpoint before returning.
wiggling_servo.write(end);
}
// ================================================================================
Source: Arduino Sketch ServoSweep