Contents
hide
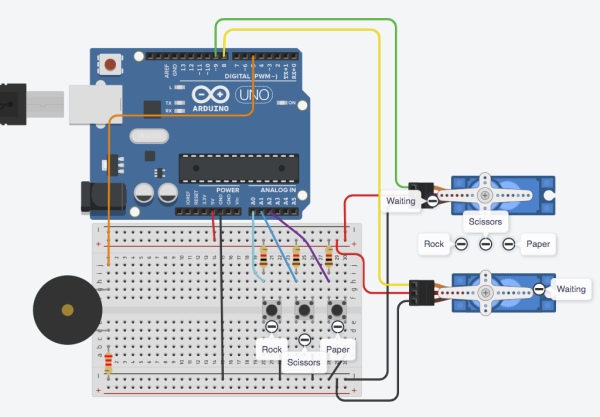
This drawing showcases a rock-paper-scissors game that utilizes three pushbuttons for user input, two hobby servos instead of a human hand to show the countdown and selections, and tone feedback through a speaker.
The code is designed to showcase a variety of techniques.
- non-blocking event polling loop to simultanously process input and output
- switch-case state machine structure to manage game control flow
- timer variables to schedule future events
- symbolic numeric constants
Tinkercad Circuit
Full Source Code
The full code is all in one file RockPaperScissors.ino.
// RockPaperScissors.ino : play ro-sham-bo using buttons.
// No copyright, 2020, Garth Zeglin. This file is
// explicitly placed in the public domain.
// This example implements a rock-paper-scissors game
// using two hobby servos to indicate the computer and
// user choices, three pushbuttons for the user to
// indicate a choice, and a speaker for tone outputs
// for game feedback.
//
// The player sees a countdown movement sequence, then
// has a short window of time to press a button after
// the computer starts moving or the match is invalid.
// If the player moves first, the computer always wins.
// The game automatically cycles back to resting.
#include <Servo.h>
// The input switches are wired as active-low
// pushbuttons. The 'analog' input pins are used here
// in the digital input mode.
const int ROCK_SWITCH_PIN = A0;
const int SCISSORS_SWITCH_PIN = A1;
const int PAPER_SWITCH_PIN = A2;
// The speaker outout.
const int SPEAKER_PIN = 5;
// Hobby servos for the player and computer move
// indicator outputs.
const int P_SERVO_PIN = 8;
const int C_SERVO_PIN = 9;
// servo hardware
Servo player_svo;
Servo computer_svo;
// ================================================
// const values to define game states (could also have
// used enum)
const int WAITING = 0;
const int ROCK = 1;
const int SCISSORS = 2;
const int PAPER = 3;
// calibration tables to maps a game state to a servo angle
const int computer_angles[] = { 0, 63, 93, 123 };
const int player_angles[] = { 0, 123, 93, 63 };
const int countdown_angle = 30;
// winning move table to return the winning state for a given state
const int win_table[] = {WAITING, PAPER, ROCK, SCISSORS};
// state machine indices, defined using enum
enum { IDLE, COUNTDOWN, MOVING, COMPUTER_WIN, PLAYER_WIN,
DRAW, FAULT, RESET };
// time constants in milliseconds
const long countdown_wait = 500;
const long valid_input_wait = 400;
const long idle_wait = 2000;
const long resolution_wait = 1500;
const long reset_wait = 1500;
const long melody_wait = 250;
// state variables for the game
int game_state = IDLE;
int game_counter = 0;
int computer_state = WAITING;
int player_state = WAITING;
long game_timer = 1000;
// state variables for the audio player
int melody_note = 60;
int melody_interval = 7;
int melody_count = 0;
long melody_timer = 0;
// ================================================
void setup()
{
player_svo.attach(P_SERVO_PIN);
computer_svo.attach(C_SERVO_PIN);
// issue an initial servo command to the reset condition
player_move(WAITING);
computer_move(WAITING);
Serial.begin(115200);
Serial.println("Welcome to rock, scissors, paper.");
}
// ================================================
void loop()
{
// The timestamp in milliseconds for the last polling
// cycle, used to compute the exact interval between
// output updates.
static unsigned long last_update_clock = 0;
// Read the millisecond clock.
unsigned long now = millis();
// Compute the time elapsed since the last poll.
// This will correctly handle wrapround of the 32-bit
// long time value given the properties of
// twos-complement arithmetic.
unsigned long interval = now - last_update_clock;
last_update_clock = now;
// Always advance the game timer; when it becomes
// negative the current phase has expired.
game_timer = game_timer - interval;
// Always keep advancing the pseudorandom generator.
long next_random = random(1,4);
// Advance the melody player if needed.
if (melody_count >= 0) {
melody_timer = melody_timer - interval;
if (melody_timer < 0) {
melody_timer = melody_wait;
play_next_note();
}
}
// Always read the player switches. This provides a
// single location to perform input validation. The
// hardware is wired for active-low logic.
bool rock_pressed = !digitalRead(ROCK_SWITCH_PIN);
bool scissors_pressed = !digitalRead(SCISSORS_SWITCH_PIN);
bool paper_pressed = !digitalRead(PAPER_SWITCH_PIN);
// Reduce the switch selection input to a single
// value, rejecting multiple pushes.
int user_input_state = WAITING; // default neutral value
if ( rock_pressed && !scissors_pressed && !paper_pressed) user_input_state = ROCK;
if (!rock_pressed && scissors_pressed && !paper_pressed) user_input_state = SCISSORS;
if (!rock_pressed && !scissors_pressed && paper_pressed) user_input_state = PAPER;
// Run one update cycle of the game state machine.
switch(game_state) {
case IDLE: // no one is moving
if (user_input_state != WAITING) {
// player has played early, let's win!
player_state = user_input_state;
computer_state = win_table[player_state];
computer_move(computer_state);
player_move(player_state);
game_state = COMPUTER_WIN;
game_timer = resolution_wait;
Serial.println("Player played early, computer wins.");
start_arpeggio(60, 7, 3);
} else if (game_timer < 0) {
// time to start the countdown
Serial.println("Starting countdown.");
game_timer = countdown_wait;
game_counter = 3;
countdown_beat(true);
game_state = COUNTDOWN;
}
break;
case COUNTDOWN:
// both are moving 1, 2, .. in preparation
if (user_input_state != WAITING) {
// player has played early, let's win!
player_state = user_input_state;
computer_state = win_table[player_state];
computer_move(computer_state);
player_move(player_state);
game_state = COMPUTER_WIN;
game_timer = resolution_wait;
Serial.println("Player played early, computer wins.");
start_arpeggio(60, 7, 3);
} else if (game_timer < 0) {
// time to continue the countdown animation
game_counter = game_counter - 1;
if (game_counter < 0) { // time to choose a move
game_timer = valid_input_wait;
computer_state = next_random;
computer_move(computer_state);
game_state = MOVING;
Serial.println("Computer moved.");
} else {
// continue the countdown animation
countdown_beat((game_counter % 2) == 1);
game_timer = countdown_wait;
}
}
break;
case MOVING:
// computer is moving, wait for user input within a
// short interval
if (user_input_state != WAITING) {
player_state = user_input_state;
player_move(player_state);
game_timer = resolution_wait;
Serial.println("Player responded.");
// decide the winner
if (computer_state == player_state) {
game_state = DRAW;
Serial.println("Draw, no winner.");
start_arpeggio(66, -6, 2);
} else if (computer_state == win_table[player_state]) {
game_state = COMPUTER_WIN;
Serial.println("Computer wins.");
start_arpeggio(60, 7, 3);
} else {
game_state = PLAYER_WIN;
Serial.println("Player wins.");
start_arpeggio(55, 12, 3);
}
} else if (game_timer < 0) {
// if the user did not respond in time
game_timer = resolution_wait;
game_state = FAULT;
Serial.println("Player did not respond, game fault.");
start_arpeggio(60, -12, 3);
}
break;
// In every game outcome, wait for servos to finish
// moving, then reset.
case COMPUTER_WIN:
case PLAYER_WIN:
case DRAW:
case FAULT:
if (game_timer < 0) {
game_timer = reset_wait;
computer_state = WAITING;
player_state = WAITING;
computer_move(computer_state);
player_move(player_state);
game_state = RESET;
}
break;
case RESET: // returning to start
if (game_timer < 0) {
game_timer = idle_wait;
game_state = IDLE;
}
break;
}
// add a short delay to not overwhelm the Tinkercad simulator
delay(20);
}
// ================================================
// movement primitives
void player_move(int state)
{
player_svo.write(player_angles[state]);
Serial.print("Player move: ");
Serial.println(state);
}
void computer_move(int state)
{
computer_svo.write(computer_angles[state]);
Serial.print("Computer move: ");
Serial.println(state);
}
void countdown_beat(bool forward)
{
if (forward) {
player_svo.write(countdown_angle);
computer_svo.write(countdown_angle);
Serial.print("beat forward...");
} else {
player_svo.write(0);
computer_svo.write(0);
Serial.println("back...");
}
}
// ================================================
// sound primitives
void start_arpeggio(int start, int interval, int length)
{
melody_note = start;
melody_interval = interval;
melody_count = length;
melody_timer = melody_wait;
play_next_note();
}
// choose and play the next note in the melody sequence
void play_next_note(void)
{
if (melody_count > 0) {
float freq = midi_to_freq(melody_note);
tone(SPEAKER_PIN, freq);
// advance the arpeggio
melody_note = melody_note + melody_interval;
melody_count = melody_count - 1;
} else if (melody_count == 0) {
// when melody_count is zero, silence the speaker
// and set it to -1 to represent the idle state
melody_count = -1;
noTone(SPEAKER_PIN);
}
}
float midi_to_freq(int midi_note)
{
const int MIDI_A0 = 21;
const float freq_A0 = 27.5;
return freq_A0 * pow(2.0, ((float)(midi_note - MIDI_A0)) / 12.0);
}
// ================================================Source: Arduino Sketch Rock Paper Scissors