Summary of The Self-Balancing Robot using Arduino
This project involves designing and constructing a self-balancing two-wheeled robot similar to a Segway. The robot’s body consists of two platforms connected by threaded rods, with the bottom holding the wheels and the top holding the microcontroller and sensors for stability. It uses an Arduino Uno microcontroller, an IMU sensor to detect tilt angles, and motor drivers to control two motors for balancing. The team collaboratively built the frame, developed and tested the software, and finalized the assembly. The robot can autonomously maintain its balance by sensing tilt and adjusting motor direction accordingly.
Parts used in the Self-Balancing Robot:
- Body structure (two platforms separated by four threaded rods)
- Two wheels
- Arduino Uno microcontroller (ATMega328 based)
- IMU sensor (SEN-10121 accelerometer and gyroscope combination)
- Motor driver capable of controlling two motors in clockwise and counter-clockwise directions
- Two motors
Introduction
The idea of this project was to design and construct a robot that consists of a body and two wheels that would be able to balance on its own. This behavior is similar how a segway (a new mode of transportation) works. Our goal was to have a working finished product – a robot that, without human interaction, could balance on two wheels.
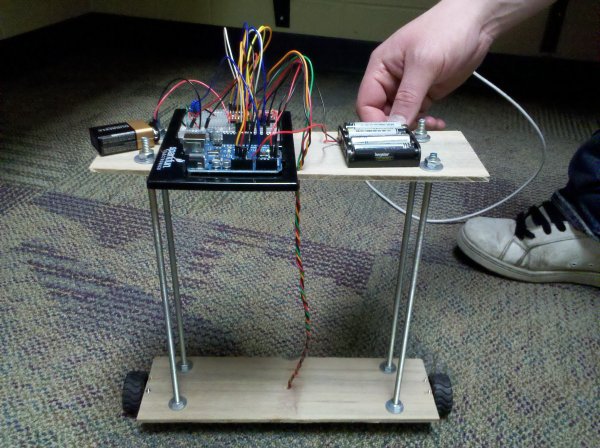
High Level – Physical Design
The design of this project is relatively simple at first glance. Physically we planned to have a body, which would be made of two platforms separated and held in place by four threaded rods. The bottom platform would simply be for holding the wheels in place. The top would hold the microcontroller and supporting hardware (which will be addressed next). The weight near the top helps keep the robot more stable, so the wheels can correct for tipping more gradually.
High Level – Microcontroller Interfacing Design
In order to make Theobald balance, we need the two most basic things in computing aside from the microcontroller itself – input and output. Our input consists of something that can sense what angle the robot is at in relation to the ground. A few things can do this: we could find distances from a side of the robot to the ground using infrared distance sensors or supersonic range finders, or we could use a combination of and accelerometer and gyroscopes to get the angle in relation to the earth and correct that way. Then we also need output. This comes in the form of our two motors which will attempt to right the falling robot. To control two motors without creating our own h-bridge motor controllers we need a motor driver with the following capabilities: interface with our microcontroller, output to two motors, and be able to go clockwise and counter-clockwise.
Member Task Distribution
This project was done in a very collaborative manner. The main construction of Theobald (as far as the frame) was completed by Ethan since he was actually in the process of building a doghouse and had all the equipment and materials at hand. After the frame was complete all members collaboratively assembled pieces, soldered, researched, developed, implemented, tested and reimplemented. After finishing, the bulk of this webpage was completed by Ethan while Zech and Tony worked on our presentation.
Hardware – Microcontroller (Arduino Uno)
The microcontroller we used is the Arduino Uno which is built on the ATMega328 microcontroller. Arduino builds the board that uses this microcontroller and gives it useful interfaces like a power jack, built in 16MHz clock, USB connection, and convenient spots for hooking up wires. Visit the link to get all the specifics with the Arduino Uno.

Hardware – IMU (SEN-10121)
This accelerometer/Gyroscope combination (often called an Inertial Measurement Unit or IMU) is very convenient in that it combines two nice devices and uses a serial interface for output when requested. If the output instead was analog, it would be up to the ATMega328′s analog to digital converter to get a digital value which has only 10 bits of precision.
For more detail: The Self-Balancing Robot using Arduino