Summary of WiFi Robot
I created a WiFi- and voice-control framework for a robot using the Arduino MKR1000 to receive controls over WiFi. A browser-based JavaScript joystick sends directional commands to a simple web server on the MKR1000, which reads client input and will forward commands to motor drivers (L298) to drive two DC motors. Voice commands were added on the client side. Example Arduino server and motor-control sketches are included for reading joystick data and controlling motor direction and speed.
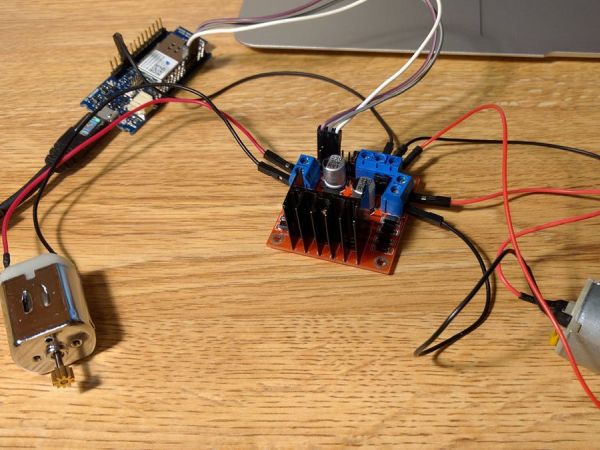
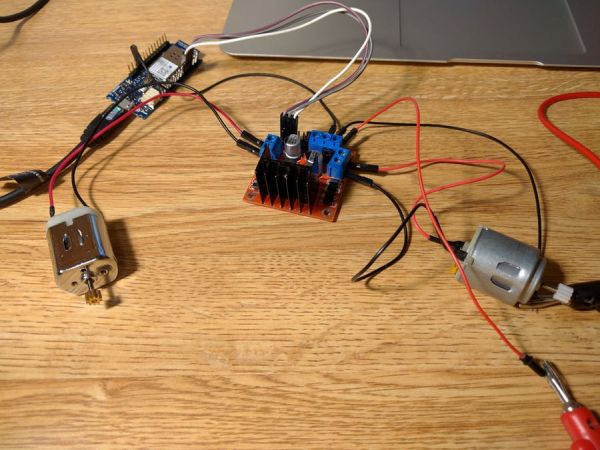
Parts used in the WiFi Robot:
- Arduino MKR1000
- DC motor (generic) ×2
- Wheels
- SparkFun Dual H-Bridge motor drivers L298
- 9V battery (generic)
I have created the framework for WiFi and voice control of a robot. The MKR1000 chip enables us to receive controls over WiFi.
Things used in this project
Hardware components |
||||||
 |
|
× | 1 | |||
|
× | 2 | ||||
|
× | 1 | ||||
 |
|
× | 1 | |||
 |
|
× | 1 | |||
Story
I began with the idea of remote controlling a device using Arduino MKR1000’s built-in WiFi capabilities.
I then added voice commands and motor control. Any user should be able to launch a web server, and with some slight modifications, send controls over WiFi to the Arduino.
By moving a JavaScript joystick in the browser, different arguments are sent over WiFi, much like search queries over Google. These can then be read as directions for the robot.
Schematics
Code
Source : WiFi Robot
- What microcontroller is used to receive WiFi controls?
The Arduino MKR1000 is used to receive controls over WiFi. - How are joystick commands sent to the robot?
A JavaScript joystick in the browser sends arguments over WiFi to the MKR1000 web server. - Can the MKR1000 run a web server for remote control?
Yes, the MKR1000 hosts a WiFiServer on port 80 to read client data. - What motor driver is used to control the DC motors?
The SparkFun Dual H-Bridge motor drivers L298 is used. - How many DC motors does the project use?
The project uses two DC motors. - What power source is listed for the project?
A generic 9V battery is listed as the power source. - Does the example server sketch read client bytes?
Yes, the server sketch accepts a client, reads a byte with client.read, and writes it to Serial. - How is motor speed controlled in the sample motor code?
Motor speed is controlled using analogWrite on a speed PWM pin.