Summary of The Look-o-box
This article documents "The Look-o-box," an Arduino-based interactive project that scans its surroundings and turns a mask toward detected objects to simulate being watched. The creator details the design concept, iterations, and a reflective summary of learning Arduino, servos, and distance sensors. The guide provides step-by-step instructions for 3D printing parts, soldering the circuit, assembling the device, programming the microcontroller, and testing the final product.
Parts used in The Look-o-box:
- 2 SG90 micro servo motors
- 1 Arduino Uno
- 1 Distance sensor (3-40 cm range)
- USB-B cable
- White PLA 3D filament
- Green PLA 3D filament
- Second glue
- Solder tin
- Breakout board
- Pins
- 3 wires
- 6 screws
Intro
Dit is een Arduino project die ik heb gemaakt voor een schoolopdracht, in deze documentatie zal ik instructies geven over hoe je dit zelf ook kan maken en wat je ervoor nodig hebt. Ook leg ik hierin vast het concept, iteraties en een korte reflectie.

Concept
Wat dit apparaat doet is het om zich heen kijken en als het wat detecteert voor de sensor draait het de masker daarna toe, hiermee geeft het de persoon die ervoor staat het gevoel dat ie word bekeken.
waarom ik dit heb ontworpen is omdat het me een leuk interactieve idee leek om te maken en dat ik dit ook graag wilde implementeren in andere projecten.
Iteraties
Voor dit project heb ik een paar iteraties gemaakt op papier voor dat ik het echt in ging, ik heb voornamelijk iteraties gemaakt van positie van het masker en hoe de sensor werkt.
Reflectie
Dit was een zeer leuk en nuttig project in mijn ogen die zeer geslaagd is. Wat ik heb geleerd tijdens If This Then That is hoe Arduinos werken en hoe deze kan gebruiken, ook heb ik geleerd om servo motors en een afstandsensor te gebruiken wat handig is voor andere projecten in de toekomst. Dit vak was erg interessant en nuttig, de kennis die ik heb geleerd zak ik zeker kunnen toepassen voor toekomstige (persoonlijk) projecten.
Supplies
Onderdelen:
- 2 SG90 micro servo’s
- 1 Arduino uno,
- 1 Afstand sensor 3-40 cm,
- Usb-B kabel,
Materiaal:
- 3D filament PLA wit,
- 3D filament PLA groen,
- seconden lijm,
- soldeer tin,
- breakout board,
- pinnen,
- 3 draadjes,
- 6 schroefjes,
Gereedschap:
- 3D printer,
- soldeerbout,
- schroevendraaier,
Step 1: Uitprinten Onderdelen
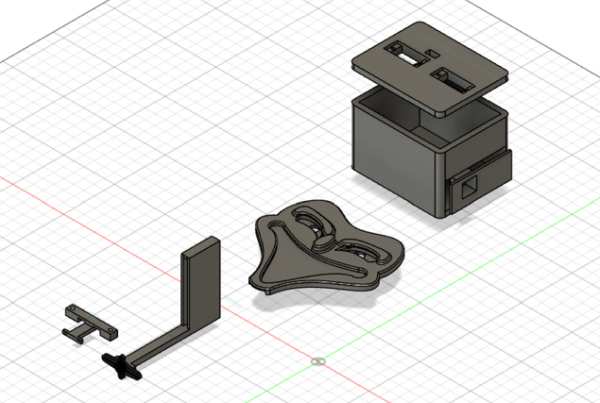
Als eerste stap heb ik de behuizing, masker en alle kleine onderdelen ontworpen in Fusion 360. Vervolgens heb ik deze uitgeprint in groen PLA en het masker in wit. Hieronder heb ik de STL bestanden staan van elk onderdeel, print deze uit en ondertussen kun je beginnen met de elektronica te solderen.
Step 2: Layout Maken & Solderen
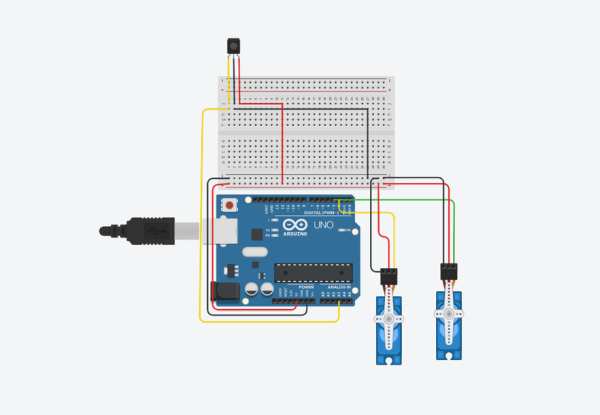
Voor deze stap heb ik eerst een layout gemaakt op Tinkercad, omdat dit een simpele circuit heb ik het gelijk al alles vast gesoldeerd. Ik heb geprobeerd om het zo compact mogelijk te maken door het gebruik van pinnen waar de conrectors van de servo’s en sensor makkelijk op aangesloten kunnen worden. Soldeer de rij pinnen voor ground vast aan elkaar, doe het zelfde voor de voltage en voor de signaal soldeer een kabel aan elke pin (3x). twee van de onderste pinnen kunnen direct op de ground en 5v op de arduino gezet worden(zie foto), de andere drie kabels moeten naar de juiste nummer(zie layout).
Step 3: In Elkaar Zetten

Als alles gereed is kan je het nu in elkaar zetten. Als eerste zou ik de Arduino in de behuizing doen en de breakout board vast maken met alle kabels in geplugd en later die van de servo’s en sensor, zet de servo hoorns erop en schroef deze vast.
vervolgens zet de servo’s in de deksel en monteer de sensor op het daarvoor bedoelde onderdeel(zie foto).
Maak het masker op het grote onderdeel vast met seconden lijm, wanneer de lijm hard is kan je de servo hoorn vast schroeven aan de onderkant.
Plug in de servo’s en sensor op de pinnen van de breakout bord en doe de deksel op de behuizing.
Als laatste doe de achterkant erop met de opening voor de usb-B kabel.
Step 4: Programmeren
//This is the code for my arduino project for If this then that, with intructions in the code.
#include <Servo.h>
Servo servosensor; //telling arduino how many servo there are.
Servo servomasker;
#define sensor A3
int angle_servo = 90; //starting angle of the servo motors
void setup() {
servosensor.attach(2); //setting up the sensors
servomasker.attach(3); Serial.begin(9600); // beginning of the sensor
}
void loop() {
for (angle_servo = 0; angle_servo <= 180; angle_servo += 1) {
servosensor.write(angle_servo); // Code for servo 1, with this I let the servo with the sensor turn 180 degrees.
delay(30);
float volts = analogRead(sensor)*0.0048828125; // Code for sensor, this detects if there is something there.
int distance = 13*pow(volts, -1); delay(10);
if (distance <= 10){ //code for servo 2, the sensor tells with this code the new position of the servo with the mask.
Serial.println("I_See_You");
servomasker.write(angle_servo);
}
if (distance >= 20){ //this part is to check if the sensor works by telling the distance.
Serial.println(distance);
}
}
// This is the same code but in reverse.
for (angle_servo = 180; angle_servo >= 0; angle_servo -= 1) {
servosensor.write(angle_servo );
delay(30);
float volts = analogRead(sensor)*0.0048828125; int distance = 13*pow(volts, -1); delay(10); if (distance <= 10){ Serial.println("Gezien");
servomasker.write(angle_servo); }
if (distance >= 20){ Serial.println(distance);
}
}
delay(2000);
}
Step 5: Testen & Klaar

Als je nu bij deze stap bent dan ben je zo goed als klaar, maar de allerlaatste stap van dit project is het testen zoals:
- Zijn servo’s goed gekalibreerd,
- Alles overal goed in zit,
- Code juist werkt,
Source: The Look-o-box
- What is the main function of The Look-o-box?
The device looks around and turns a mask toward any object detected by the sensor to make people feel watched. - How does the distance sensor determine if something is there?
The code reads analog voltage values and calculates distance using the formula 13 times volts to the power of negative one. - Which software was used to design the layout?
Tinkercad was used to create the circuit layout before soldering. - What material was used to print the housing and mask?
The housing was printed with green PLA and the mask was printed with white PLA. - Can I use this project for future personal projects?
Yes, the author states the knowledge gained about Arduinos, servo motors, and distance sensors will be useful for future projects. - What happens when the distance is less than or equal to 10 centimeters?
The code prints I_See_You on the serial monitor and moves the mask servo to the current angle of the sensor servo. - Which pins are connected to ground and 5v on the Arduino?
Two of the bottom pins connect directly to ground and 5v on the Arduino. - How many servo motors are attached in the setup function?
Two servo motors are attached, one named servosensor on pin 2 and one named servomasker on pin 3.