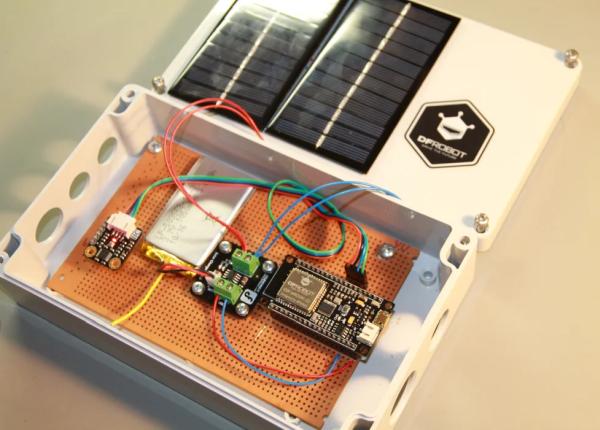
ESP32 Solar Weather Station
For my first IoT project I wanted to build a Weather Station and send the data to data.sparkfun.com. Small correction, when I decided to open my account in Sparkfun, they were not accepting more connections, so I choose another IoT data collector thingspeak.com. Continuing… The system will be placed on my balcony and will retrieve temperature, […]