Summary of Katrina And Maya
bOunce is a haptics-based learning game teaching wave dynamics and resonance. Users "bounce" a virtual ball, feeling force feedback to time inputs for specific heights across three levels: large ball, small ball, and underwater. The system uses an Arduino with an Ardumoto Shield, adapted from a Haptic Paddle kit, to interface with a Processing-based virtual environment. It successfully engaged students in hypothesis testing and physics concepts through interactive, multi-sensory learning.
Parts used in the bOunce Game:
- Arduino
- Ardumoto Shield
- Haptic Paddle kit (adapted)
- Bounce adapter
- External switches
- Backgrounding box
- Processing graphics environment
- MATLAB simulation software
bOunce is a haptics-based learning game system that teaches the concepts behind wave dynamics, and in particular, resonance. The bOunce device (an adaptation of the Haptic Paddle) allows a user to “bounce” a ball in a virtual environment. By feeling the haptic force feedback from the virtual ball, as well as seeing the ball’s waveform trajectory in the virtual environment, the user strategically times his or her force input in order to make the ball to bounce to a certain goal height in as short a time as possible. The game contains three distinct “levels”: bouncing a large ball, a small ball, and a small ball underwater. The users are encouraged to make hypotheses about the ideal driving frequency for the system on each level. The game’s competitive aspect, as well as its educational motivation, make it ideal for middle- and high-school settings. During the demo day, bOunce was successful in teaching wave dynamics concepts, helping students practice making hypotheses and conclusions, attracting users, and imbuing a sense of enthusiasm for physics and educational applications of haptic systems.
Introduction
This project was motivated by the need for students to intuitively understand abstract physics concepts. Students struggle with topics related to waveforms (amplitude, frequency, phase, interference, resonance) simply because they cannot see or feel these phenomena. The bOunce device displays these effects and allows a user to interact directly (by matching the resonant frequency of a bouncing ball). This activity greatly enhances learning about waves, with relevance to many fields of science and engineering: electromagnetism, sound, mechanics, optics, and oceanography.
Background
Perkins, et. al, “Interactive Simulations for Teaching and Learning Physics” [1]
Perkins et. al. have developed multiple web-based game-like simulations for use in teaching physics concepts at the high school and college levels. These simulations aimed to: (1) increase student engagement and (2) improve learning through exploration. The simulations focus on creating visualizations of phenomena that are not normally visible to the human eye (atomic/particle movements, electric fields, etc.). Using these simulations in lecture has been shown to motivate unprompted high-quality questions and comments from students. The Wave-on-a-String and Radio Waves programs graphically display the concepts of frequency, amplitude, interference, etc. In the Masses and Springs program, students learn about damped oscillation through the lifelike look of the graphics, which mimics the students’ real-world experience. The student feedback to the use of these simulations was largely positive, and many students appreciated the ability to quickly manipulate the programs to investigate new effects. Furthermore, students commented on the helpfulness of visualizing concepts that are normally not visible.
This study indicates that visualization of abstract physics concepts is helpful for student learning. However, Perkins et. al. have developed a purely visual interface – we still see a need for haptic-based learning for students who do not identify with visual learning and to enhance the learning of students who do. Our device incorporates the visual elements presented above in our graphical interface, but also adds haptic interaction to further improve learning.
Lee, “Pendulums: A Hands-on Way to Experience Resonance” [2]
by Lee [2]. Lee has developed a set of hands-on pendulum activities to teach wave concepts such as frequency, amplitude, and resonance to students in middle school. Using simple construction techniques, Lee outlines the procedure to build various pendulum systems out of 2 liter soda bottles, strings, and film canisters filled with coins (see Figure 1).
Students are encouraged to alter the modular setup (lengths, masses, number of hanging objects, etc.). Based on these changes, students are able to manually input forces and witness the differences in behavior, depending on the system. Students are also encouraged to make hypotheses, record observations, and deduce conclusions. These activities are cost-effective, simple to assemble, and allow the students to feel the resonance of a system, an aspect that our device will also capture. However, parameter manipulation requires the student (or teacher) to build an entirely different apparatus with the specified parameters. Our device, by contrast, enables the student to investigate a different system by flipping a single switch to instantly change a parameter (changing the level).
Berner, “Resonant Wineglasses and Ping-PongTM Balls” [3]
Apparatus Designed by Berner [3]. Berner has designed a system that uses a signal generator (visualized by vibrating ping-pong ball) to break a glass container, in order to create an effective physics demonstration of resonance. A glass is chosen with a stem, so that it can be supported (see Figure 2). A high-frequency sound is driven near the glass, and when the natural resonance of the glass is achieved, the ping-pong ball starts to vibrate within. The amplitude of the signal is increased until the glass breaks. Using strobe lights, the students are able to estimate the oscillation mode of the glass. Everyone present for the demonstration is required to wear ear protection, and the glass apparatus must be properly shielded for safety.
Berner’s demonstration has quite a dramatic effect; however, the students’ experience is passive. They simply watch resonance in action, which (although remarkable) limits the interaction between the student and the abstract concept. Furthermore, the materials required are costly, and there are significant safety concerns. Therefore, this is not a practical demonstration to be employed in a high school or middle school setting. It is one better suited for a college-level lab. Lastly, this demonstration operates at one set of parameters and cannot be manipulated by the students. Our device is successful in addressing these concerns.
Huang, “Haptic Feedback Improves Manual Excitation of a Sprung Mass” [4]
It has been previously shown that users who were given haptic feedback when forcing a dynamic system, rather than relying on visual feedback alone, were able to more consistently and more quickly determine the resonant frequency of the system. These users were asked to excite a handle directly attached to a spring mass damper system in front of them; haptic feedback, sometimes coupled with visual feedback, were meant to inform the users efforts to find the resonant frequency. Although effective, this device is not necessarily “kid-friendly”, thus, our device builds upon this user experience by making it more accessible to kids and teenagers.
Gillespie, “Stable User-Specific Haptic Rendering of the Virtual Wall” [5]
A virtual environment model for a bouncing ball has been previously developed by Gillespie and Cutkosky. For this system in particular, gravity rather than user input is the driving force on the ball. This strategy circumvents a notable modeling complication arising in both [4]‘ and [5]‘ related to the user’s ability to vary the impedance of the input, which is not predictable and is thus difficult to model. Instead, a ball driven by gravity (a predictable driving force) represented the “user input”, serving as an allegory to inform controller design for a system.
We ultimately decided to simulate our system as a simple spring-mass-damper system, neglecting the effects of gravity, in order to circumvent the complications discussed. This analogy was successful in providing a compelling haptic sensation for the users of bOunce.
Young et. al, “Learning Force Concepts Using Visual Trajectory and Haptic Force Information at the Elementary School Level” [6].
The educational paradigm inspiring bOunce came largely from the work of Young et al. on teaching elementary school students about buoyancy with haptic simulation activities. Fourth and sixth grade students were given a pretest on concepts related to buoyancy before advancing through a series of teaching activities. Both subgroups involved in the study received visual feedback as they picked up blocks of different material properties and placed them in tanks of liquid. However, only one received force feedback, allowing only this group to feel the buoyant and gravitational forces on the blocks throughout the activities. After finishing the activities, both subgroups were given a posttest that was identical to the pretest, but with answer choices reordered.
The activity allowed posttest scores to improve across both age groups and across both user subgroups (visual and visuohaptic). It was promising that although the 4th and 6th grade students started from different math and science backgrounds, they arrived at comparable levels of posttest understanding. This result indicates that the researchers enabled experiential learning of a science concept that was equally accessible to the two age groups, despite the discrepancy in math and science foundations. However, test results did not indicate that the addition of haptic feedback allowed for statistically significant improvement in learning. The researchers suggested using test questions that more accurately tease out the effect of haptic feedback (i.e. not using questions that referenced only visual cues during the activities) in later iterations of the user study. More appropriate questions might lead to more promising results that make a better case for adding haptics into educational curricula.
In considering how to design user studies for bOunce, the importance of careful test question formulation, highlighted by the work of Young et al., should be kept in mind. See Future Work for more information.
Methods
Hardware Design and Implementation
An Arduino and Ardumoto Shield were used to interface between the system hardware and the virtual environment. Their low cost and user-friendly functionality make them a good choice for design and implementation of haptic educational modules.
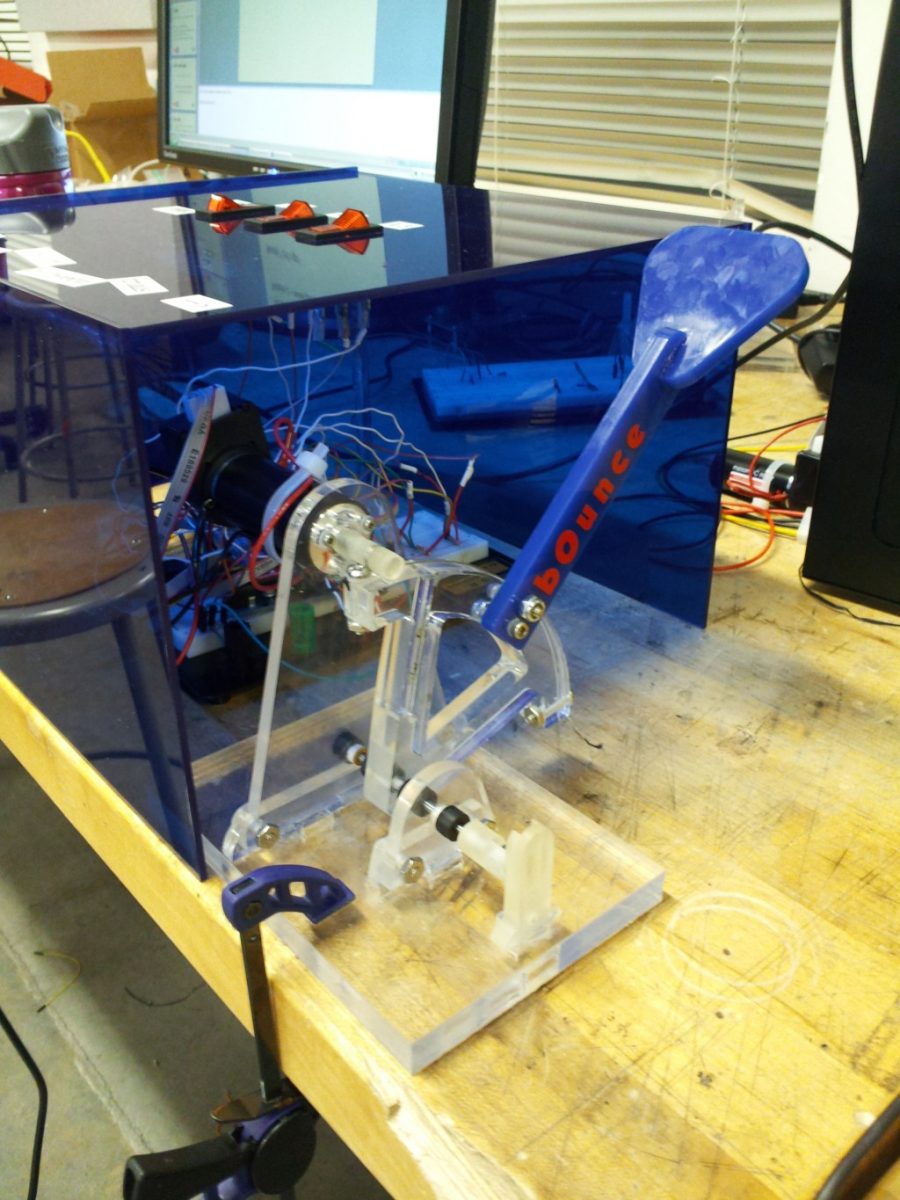
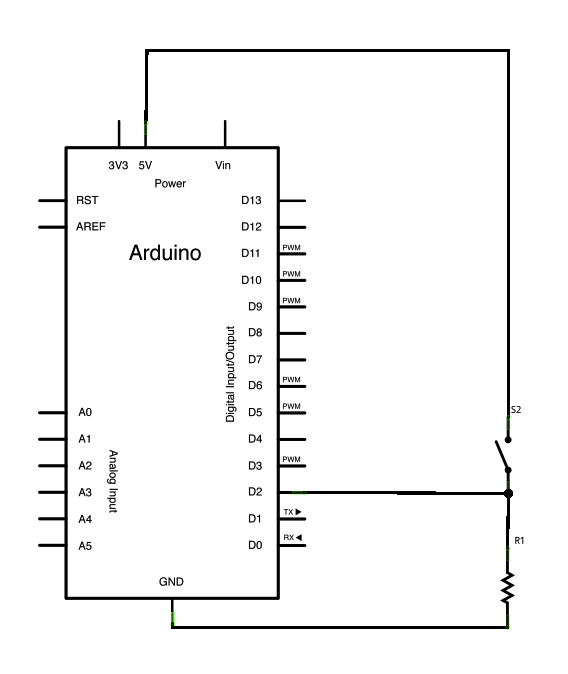
The bOunce user interface hardware is an adaptation of the existing Haptic Paddle kit [7]. The original sector pulley handle is replaced by the bounce adapter. External switches were implemented in order to change between levels of the bOunce game. This was necessary because the Arduino could not simultaneously accept Serial user input while printing to the serial monitor of Processing, the graphics environment that displays the position and motion of the virtual ball.
A backgrounding box was added to keep hardware from distracting the users, but materials were kept translucent so that some transparency was preserved. Thus, some amount of teaching was enabled toward a separate educational goal of teaching users how the haptic system works.
Virtual Environment Analysis and Implementation
MATLAB Simulation. The actual dynamics of a bouncing ball system can be extremely chaotic, involving bifurcation theory and colliding manifolds. We used a spring mass damper system forced by repeated step inputs (at a user-determined “step – frequency”) as a simplified model for the bouncing ball system. Our numerical simulations indicated that such a system reaches a kind of resonance that is analogous to the resonance achieved by driving a spring mass damper system at its natural frequency. (However, this “like-resonance” occurs at a different frequency than the true natural frequency of the spring-mass-damper system).
Programming. MATLAB simulation results informed the step input driven spring-mass-damper simulation in the Arduino programming. Different mass and damping parameters were applied to different levels of the game. The equilibrium ball, or mass, position was set one centimeter away (in arc length) away from the upright bounce adapter paddle. Once the user “bounces” the mass a certain distance by pushing the paddle, the simulation loops through the dynamic response of the mass and performs numerical integration to find the velocity and position of the ball, based on the paddle position sensed. See attached Arduino code for details.
For more detail: Katrina And Maya
- How does the bOunce device teach wave dynamics?
The device allows users to feel haptic force feedback while seeing a waveform trajectory, enabling them to strategically time force inputs to reach goal heights. - What are the three distinct levels in the game?
The levels involve bouncing a large ball, a small ball, and a small ball underwater. - Which hardware components were used to interface the system?
An Arduino and an Ardumoto Shield were used to connect the hardware to the virtual environment. - Why were external switches implemented in the design?
Switches were needed because the Arduino could not simultaneously accept Serial user input while printing to the serial monitor of Processing. - How was the virtual environment modeled?
The system simulated a spring-mass-damper system forced by repeated step inputs rather than a chaotic bouncing ball model. - Can students change parameters instantly in this device?
Yes, unlike physical pendulum setups requiring reassembly, this device lets students investigate different systems by flipping a single switch. - What educational motivation makes this ideal for schools?
The competitive aspect and educational value make it suitable for middle- and high-school settings to practice making hypotheses. - Does the backgrounding box block all visibility?
No, materials were kept translucent so some transparency was preserved to allow teaching on how the haptic system works.