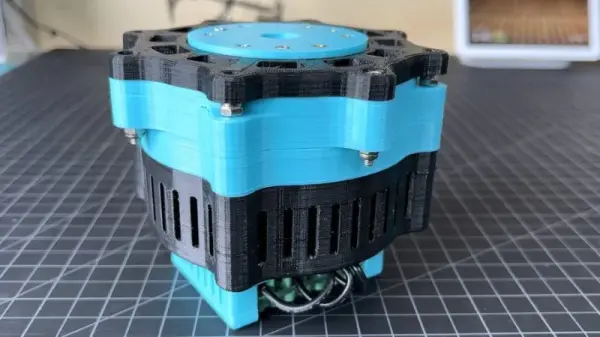
[Aaed Musa] has built a variety of robots over the years, but found off-the-shelf servos to be underwhelming for his work. Thus, he set out to build a better actuator to support his goals of building a high-performance walking bot in future.[Aaed] decided to try and build a quasi-direct drive actuator, similar to those used in MIT’s agile mini Cheetah robot. It consists of a powerful brushless DC motor driving a 9:1 planetary gear reduction built with 3D printed parts, which provides high torque output. It’s designed to be run with an ODrive S1 motor controller with encoder feedback for precise control.
The actuator weighs in at a total of 935 grams. It’s not cheap, with the bill of materials totaling just under $250. For your money, though, you get a responsive robotic actuator with a hefty holding torque of over 16 Nm, which [Aaed] demonstrates by having the actuator shake around some dumbells on a long lever arm.
This website uses cookies to improve your experience. We'll assume you're ok with this, but you can opt-out if you wish.ACCEPTCheck Privacy Policy
Manage consent
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.