Summary of Compact 3-in-1 Stripboard DIYduino with Integrated Sensor and L298N Motor Shield
This article presents a compact stripboard DIYduino combining an Arduino-compatible minimalist ATmega board, a 2A L298N motor driver, and a sensor-shield interface. Five versions are described (barebones up to 2-channel motor shield with speed control). The author details tools, assembly steps, schematic choices, part-value changes, wiring of motor-driver pins to Arduino pins, cost comparisons, and bootloader programming options. Photographs illustrate the chosen third version (1-channel with speed control). Cost and parts tables, plus build notes and sources, are provided.
Parts used in the DIYduino:
- Stripboard (veroboard)
- ATmega168/ATmega328 microcontroller
- 16 MHz crystal
- Capacitors for 5V regulator (values adjusted from stock)
- Voltage regulator (5V)
- L298N motor driver
- Screw terminals (optional)
- LEDs (optional)
- Current-limiting resistors for LEDs (optional)
- Male/female header pins
- Jumper wires
- USB-to-serial Arduino or USBtoSerial programmer
- ArduinoISP Bootloader/Programmer Combination Shield (optional)
- Power supply (3V to 12V variable for testing)
- Heat sink (for motor driver)
- Standoffs
I am presenting a compact design of a stripboard Arduino board (DIYduino) that includes a 2A motor driver and has additionally the functionality of a sensor shield. The 2-channel version cost approximately $29.43 and is more affordable compared to $39.00 for a commercially available system consisting of an Arduino Uno, $21.50, a sensor shield, $8.50, and a motor shield, $9.00. The cost can be further reduced to $27.44 by building a “bare bones” version that omits parts that are not required for the functionality of the device but are rather added for convenience. Such parts are LEDs and their resistors and screw terminals.
I am presenting a total of five different versions:
1. DIYduino
2. DIYduino with integrated sensor and 1-channel motorshield – no speed control
3. DIYduino with integrated sensor and 1-channel motorshield – with speed control
4. DIYduino with integrated sensor and 2-channel motorshield – no speed control
5. DIYduino with integrated sensor and 2-channel motorshield – with speed control
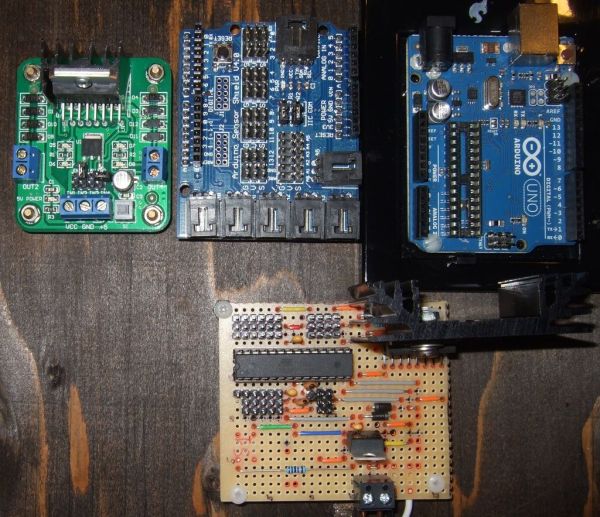
My pictures represent the third version, which is the one I chose for a particular robot application that I am currently building.
Step 2: Tools and Hardware
The picture shows most of the hardware that I used:
1) Solder iron & solder – to solder everything together
2) Carpet knife – to separate copper traces between holes
3) Hand saw with skinny blade – to cut strip board to size
4) File, not too coarse – to deburr strip board after cutting it
5) Wire cutters – to shorten legs of soldered electronic component
6) Fine tipped pliers – to bend component legs
7) Red, black, blue sharpie markers and pencil – to transfer layout to stripboard
8) Third Hand (invented by rstraugh …thanks) – to hold parts and board when needed
9) Track Cutter (invented by scraptopower …much obliged) – to separate copper traces at holes
10) Voltmeter with test leads – to confirm functionality of separation cuts and debugging
11) Scanned in strip board pattern – to develop stripboard schematic
12) ArduinoISP Bootloader/Programmer Combination Shield (not shown) & Arduino with USB to serial chip (e.g. Arduino Uno) – to upload the bootloader and sketches to DIYduino. You can also use a USBtoSerial programmer for uploading a sketch and work around the Bootloader Shield and use the DIYduino you build here to load the bootloader.
13) Cables to plug onto male/female connectors (not shown) – to make connections for testing
14) Variable power supply with voltage range of roughly 3V to 12V – to test voltage regulator and provide power to stripboard (not shown)
15) Computer with Arduino software – to test functionality of DIYduino & motor driver (not shown)
16) Drill and drill bits (not shown) – to widen/drill holes for stand offs and drill hole in heat sink
Step 3: Combining Schematics of DIYduino & Motor Driver
To create the strip board layout I determined the schematic I wanted to create first. You can essentially do a strip board design with any schematic no matter if you invented it, downloaded it, or re-engineered it. For me the official Arduino schematic was a tad too complicated and essentially overkill for my purpose. Instead I altered the much simpler schematic of the minimalist Arduino as shown in the first figure. This schematic was published and discussed on http://thetransistor.com/projects/arduino/.
In the schematic shown here I marked my changes in red color:
1. I crossed out the items that weren’t part of my built.
2. I changed the values of the capacitors that smooth potential voltage peaks at the 5V regulator. These are the values that I had available in my stock and they’ll do the job.
3. I crossed out the LED/resistor connected to Pin13 to safe parts. I only connected an LED/resistor temporarily to test the functionality of the DIYduino as described later.
4. I removed the +5V from the Aref as recommended in a comment with respect to this tutorial: http://arduino.cc/forum/index.php/topic,7569.0.html
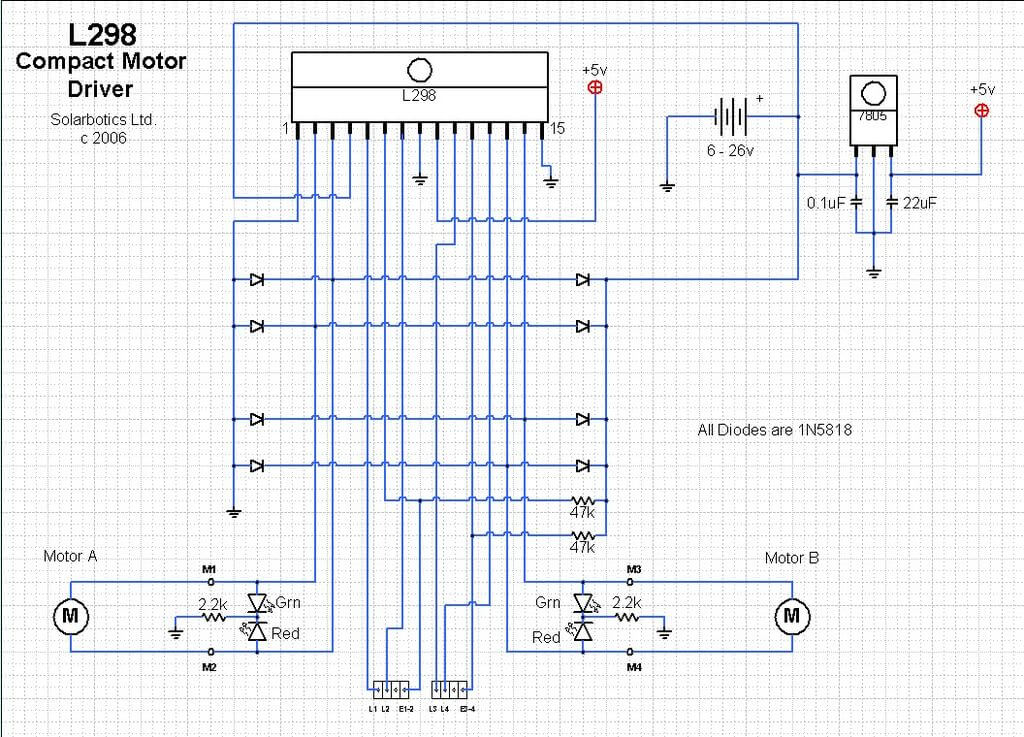
Then I combined the minimalist Arduino schematic with a schematic of a L298N motordriver that I found on solarbotics’s site. I did this by connecting L1, L2, L3, and L4 (L298N pins 5, 7, 10, & 12) to the ATMEGA’s digital pins 7, 8, 13, & 12, respectively. Pins E1-2 and E3-4 (L298N pins 6 & 11) are connected to +5V for maximum motor speed at all times or to Arduino PWM pins 9 & 6 for adjustable motor speed, respectively. I am also showing the ATMEGA 168/328 pin map, which help me to assign the proper ATMEGA pins and which can be found at http://arduino.cc/en/Hacking/PinMapping168.
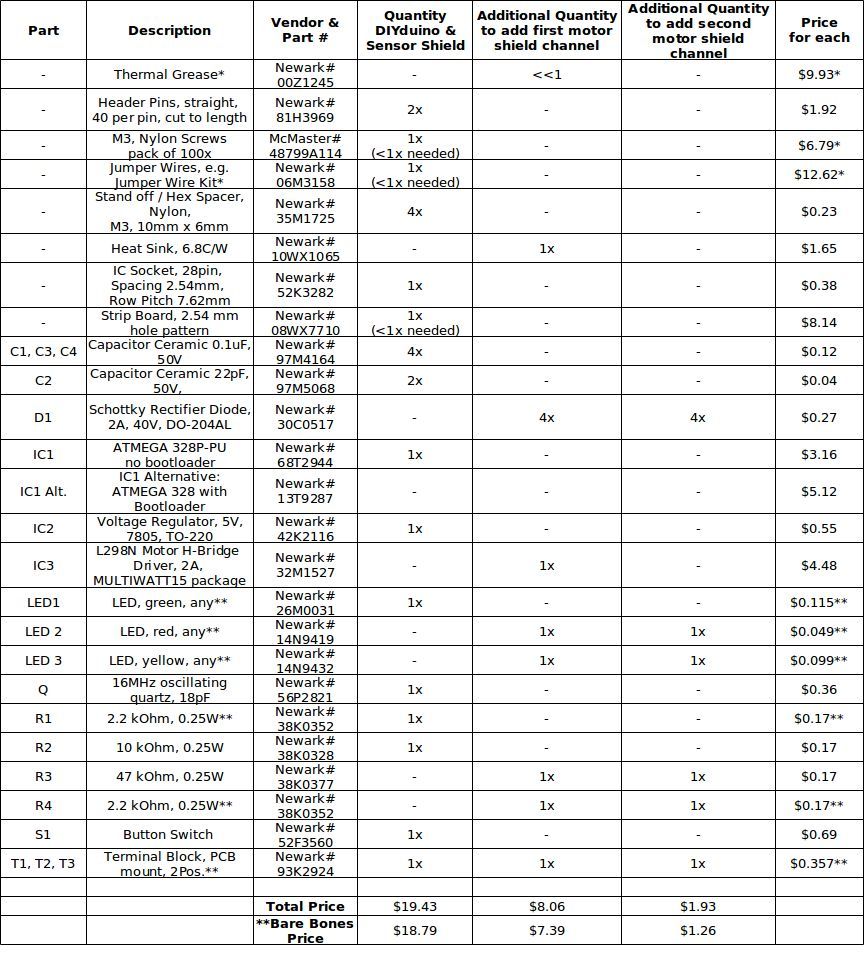
The table shows all the parts for the devices including prices from Jan, 2013. I considered some of the parts, such as jumper wires or resistors, as standard inventory that is likely purchased in bulk and not as individual parts. Therefore I typically listed individual parts and noted with an asterisk when you would have leftovers, such as for example extra strip board which you can use on other projects.
I did not consider the prices marked with the single asterisk for the total price of the device. Further note that item prices at Newark drop when you order a certain number of parts, typically if you order more than 10x. I listed the highest individual prices here and also ignored any special offers or promotions. If you buy more the price will go down. On another note, not all of the parts listed here are really necessary for operation. The parts that you can omit are marked with a double asterisk. The ‘bare bones price’ is also indicated at the bottom of the table.
Last not least, the ATMEGA 328 that I used required a bootloader. I recently created an instructable called ArduinoISP Bootloader/Programmer Combination Shield that addressed how to upload a bootloader to a “virgin” ATMEGA. You can also buy ATMEGAs that have a bootloader installed. They are almost double the price. For completion I listed one in the table.
The component prices were taken from www.newark.com and www.mcmaster.com. You can find order numbers and prices in the table.
For more detail: Compact 3-in-1 Stripboard DIYduino with Integrated Sensor and L298N Motor Shield
- What versions of the DIYduino are presented?
Five versions: DIYduino; with integrated sensor and 1-channel motorshield no speed control; 1-channel with speed control; 2-channel no speed control; 2-channel with speed control. - How much does the 2-channel version cost approximately?
The 2-channel version costs approximately $29.43 according to the article. - Can the build cost be reduced further?
Yes, by building a bare bones version that omits convenience parts like LEDs, their resistors, and screw terminals, reducing cost to about $27.44. - Which motor driver is used in the design?
The L298N motor driver is used and integrated with the DIYduino. - How are the L298N control pins connected to the ATmega?
L298N pins L1-L4 (pins 5,7,10,12) are connected to ATmega digital pins 7, 8, 13, and 12 respectively, and enable pins can be tied to +5V or to PWM pins 9 and 6 for speed control. - What schematic did the author base the minimalist Arduino on?
The author based the design on a minimalist Arduino schematic published on the transistor.com projects page and altered it. - Are all listed parts necessary for operation?
No, some parts are optional and marked as omittable in the parts table; LEDs, resistors, and screw terminals are examples. - How is the bootloader handled for the ATmega?
The ATmega 328 used required a bootloader; the author used an ArduinoISP Bootloader/Programmer Combination Shield or alternatively a USBtoSerial programmer; pre-bootloaded ATmegas can be purchased.