Summary of Autonomous Race Car using Arduino
This article details the creation of an autonomous driving robot car by modifying a vintage RC toy. The project involves removing the original radio control board and installing an Arduino Uno brain with a motor driver and ultrasonic sensor. The vehicle operates using four logic modes: full speed when clear, cruising at moderate distances, avoiding obstacles by turning randomly, and reversing if objects are too close. This transformation turns a simple toy into a basic obstacle-avoidance robot.
Parts used in the Autonomous Driving Robot Car:
- Radio controlled toy car
- Arduino Uno
- Motor driver board (2 channel)
- Ultrasonic sensor distance measuring module
- Bread board
Build this autonomous driving robot car based on a old RC toy car. I removed the radio control board from the car and replaced it with a brain in the form of an Arduino UNO board (plus a motor driver board) and gave it an ultrasonic distance measuring module to see the world through.

Step 1: Components
- Radio controlled toy car
- Arduino Uno
- Motor driver board (2 channel)
- Ultrasonic sensor distance measuring module
- Bread board
Step 2: Brain transplant
Remove the radio control board from the RC car cutting all wires close to the board. Connect wires to the motor driver board – rear wheel motor in one channel – front wheel steering motor in the other channel.
“Steal” power from the cars batteries.
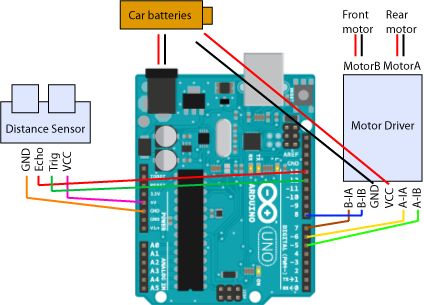
Step 3: Connect Arduino board and the ultrasonic sensor
Connect the ultrasonic sensor and the motor driver to the Arduino board.
Step 4: The programming
The cars intelligence is pretty simple. It’s based on different modes that controles speed & direction depending on distance to objects ahead of the car:
FULL SPEED MODE – No objects ahead – full speed
CRUISE MODE – Object is X cm away – slow down
AVOID MODE – Object is too close for comfort – slow down and turn in random direction
REVERSE MODE – Object is very close – stop and reverse for 2 seconds
- How is the original control system removed?
The radio control board is removed by cutting all wires close to the board. - What components form the new brain of the car?
An Arduino Uno board plus a motor driver board replaces the old electronics. - How are the motors connected to the new system?
Wires connect to the motor driver board with the rear wheel motor on one channel and the front wheel steering motor on the other. - Where does the power come from for the new setup?
Power is stolen directly from the cars existing batteries. - What happens in Full Speed Mode?
The car moves at full speed when no objects are detected ahead. - When does the car switch to Cruise Mode?
Cruise mode activates when an object is X cm away, causing the car to slow down. - How does the car behave in Avoid Mode?
In this mode, the car slows down and turns in a random direction because an object is too close. - What occurs during Reverse Mode?
The car stops and reverses for 2 seconds when an object is very close.