The PhytoBot is a semi-intelligent plant which responds to external stimulus (light intensity and light location) and responds to it as a phototropic plant would. Essentially it is designed as a piece of interactive artwork for operation over a long period of time. The motivation driving this was triggered by the lack of understanding & acceptance of plants as reactive living organisms. Many of us are so used to placing life on merely objects that have visual and audible external responses which can be seen by the naked eye. Plants on the other hand tend to be overlooked as their responses are more drawn out over time and hence we tend to see them as inanimate objects.
The PhytoBot has two degrees of freedom and motion, rotational and angular (from the normal). The rotational range of motion is 360 degrees whereas the vertical/angular range is approximately 70 degrees. The second component of the response is the pulsing lights on the face. The lights pulse from on to off in a smooth glowing fashion as if the plant was breathing. The variance in frequency is driven by the amount of light given to the plant. A fast pulse indicates that the plant is healthy, and a slow pulse indicates that the plant is in need of more light. There are two basic mechanical features within the PhytoBot. When the PhytoBot actively seeks light, it is oriented by two servos in the x and y axes. When the light has been located the plant will twitch depending on how far away the light source is. For example a closer point light will produce more twitching than if the Plant was facing the sun.
Parts List:
– Plastic Laser Cut Structural Parts
– Foam Petals
– Foam core Box
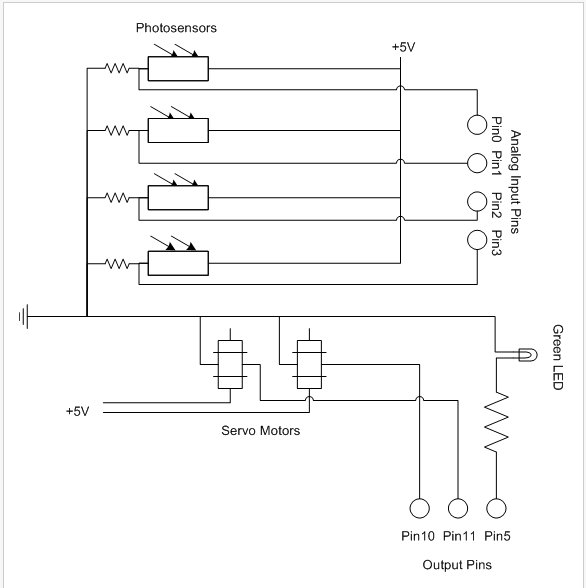
– 4 Photo sensors
– 1 Green LED
– Wire (Solid core Flexible)
– Cable Wire
– 1 Standard Servo
– 1 Continuous rotation servo
– Screws
– 1 Arduino Microcontroller
– 4 100kOhm resistors
– Circuit boards for soldering components
– Acrylic glue
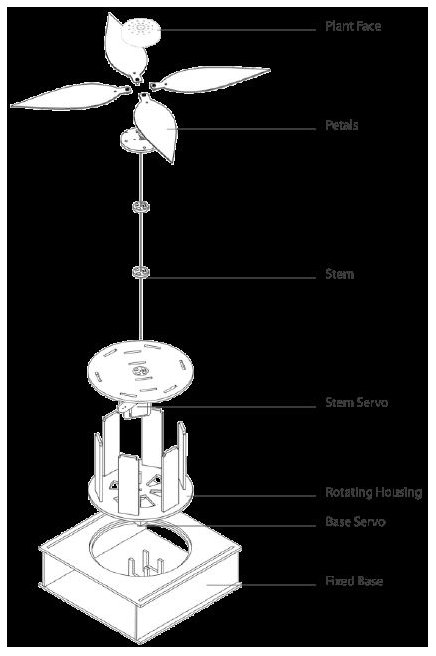
How it is Built: The PhytoBot is built primarily from laser cut acrylic parts. It was paramount to have my parts laser cut as they needed to fit correctly with minimal error. The whole plant can be divided up into 4 segments, the fixed base, rotating housing, stem and face. Each segment has their specific application and all working together complete the PhytoBot. The fixed base houses the rotational servo which in turn rotates the whole rotating housing. The rotating housing contains the stem servo. This stem servo is attached to the face via a cable wire through the stem.
For more detail: Augmenting Plant Behavior Through Robotics using Arduino