Summary of Arduino Sketch Read Sonar
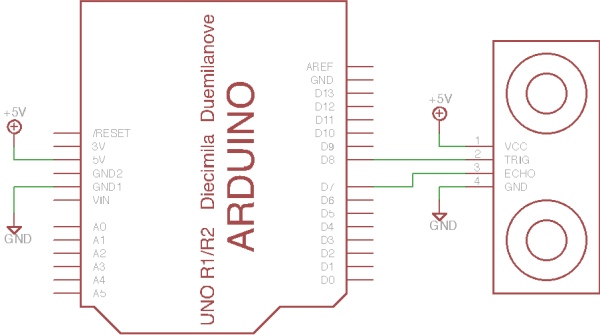
This Arduino sketch measures distance with an HC‑SR04 ultrasonic ranger (TRIG on pin 8, ECHO on pin 7). It sends a 10 μs trigger pulse, times the echo using pulseIn with a timeout, converts duration to centimeters using sound speed, and prints results to the serial console at 9600 baud. If no echo is received within the timeout, it reports No ping. A 30 ms delay allows sensor recovery between measurements.
Parts used in the ReadSonar:
- Arduino (for example Arduino UNO)
- HC-SR04 ultrasonic ranger
- Wires for connections (TRIG to pin 8, ECHO to pin 7, VCC, GND)
- USB cable for serial console / power
This sketch is used by Exercise: Read Ultrasonic Ranger.
Full Source Code
The full code is all in one file ReadSonar.ino.
// ReadSonar - measure distance using a HC-SR04 or compatible ultrasonic ranger
//
// Copyright (c) 2016, Garth Zeglin. All rights reserved. Licensed under the
// terms of the BSD 3-clause license as included in LICENSE.
//
// This program assumes that:
//
// 1. A SR04 sonar is connected: as follows: pin 8 is TRIG, pin 7 is ECHO.
// Note: this sensor has +5V digital outputs can connect directly to the
// digital input pins on the Arduino UNO.
//
// 2. The serial console on the Arduino IDE is set to 9600 baud communications speed.
//
// Note: this works, but could still use refinement. The actual module echo
// waveform doesn't quite match the description, there appears to be an initial
// HIGH pulse prior to the LOW during propagation time. A better solution may
// be to use the NewPing library.
// ================================================================================
// Define constant values.
// The wiring assignment.
const int TRIG_PIN = 8;
const int ECHO_PIN = 7;
// The rated distance limit of the sensor, in cm.
const int MAX_DISTANCE = 450;
// A typical speed of sound, specified in cm/sec.
const long SOUND_SPEED = 34000;
// Determine the maximum time to wait for an echo. The maximum rated distance is
// 4.5 meters; if no echo is received within the duration representing this
// round-trip distance, stop measuring. The timeout is specified in
// microseconds.
const long TIMEOUT = (2 * MAX_DISTANCE * 1000000)/SOUND_SPEED;
// ================================================================================
// Configure the hardware once after booting up. This runs once after pressing
// reset or powering up the board.
void setup()
{
// Initialize the serial UART at 9600 bits per second.
Serial.begin(9600);
// Initialize the trigger pin for output.
pinMode(TRIG_PIN, OUTPUT);
digitalWrite(TRIG_PIN, LOW);
// Initialize the echo pin for input.
pinMode(ECHO_PIN, INPUT);
}
// ================================================================================
// Run one iteration of the main event loop. The Arduino system will call this
// function over and over forever.
void loop()
{
// Read the distance as an uncalibrated timing value in microseconds.
long duration = ping_sonar(); // function is defined below
// If valid, scale into real-world units.
if (duration > 0) {
// Convert to a distance. Note that the speed of sound is specified in
// cm/sec, so the duration is scaled from microsecondst o seconds. The
// factor of 2 accounts for the round-trip doubling the time.
float distance = (duration * 1e-6 * SOUND_SPEED) / 2;
Serial.print("Ping: ");
Serial.print(duration);
Serial.print(" usec Distance: ");
Serial.print(distance);
Serial.println(" cm");
} else {
// if no pulse detected
Serial.println("No ping.");
}
// Allow a little extra time for the sonar to recover.
delay(30);
}
// ================================================================================
// Ping function to run one measurement cycle using the sonar. Returns a ping
// travel duration in microseconds, or 0 if no echo was observed.
long ping_sonar(void)
{
// Generate a short trigger pulse.
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
// Measure the pulse length
return pulseIn(ECHO_PIN, HIGH, TIMEOUT);
}
// ================================================================================
Source: Arduino Sketch ReadSonar
- What pins are used for TRIG and ECHO?
TRIG is on pin 8 and ECHO is on pin 7 as defined in the sketch. - How is the trigger pulse generated?
The code sets TRIG pin HIGH for 10 microseconds then LOW to generate the trigger pulse. - How is the echo measured?
The sketch uses pulseIn on the ECHO pin to measure the echo pulse length in microseconds with a timeout. - How is distance calculated?
Distance is computed from duration using SOUND_SPEED (34000 cm/s), converting microseconds to seconds and dividing by 2 for round trip. - What happens if no echo is received?
The code prints No ping when pulseIn times out and returns 0. - What serial speed should be used?
The serial console is initialized at 9600 baud in setup. - What timeout is used for waiting for an echo?
TIMEOUT is computed from MAX_DISTANCE (450 cm) and SOUND_SPEED to cover the round-trip time up to that distance. - Why is there a delay after each measurement?
There is a 30 ms delay to allow the sonar to recover between measurements.