So I had some luck with getting the Sharp Infrared range finder working and I’ve now plugged this on to my servo rig to see if I get better results on my radar styled display.
Check out how to use the Sharp IR range finder here
Few things to bare in mind, whilst the code is pretty much the same there are a few subtle differences. Firstly for better readings the Arduino code has a longer delay – but since we’re not allowing for a sonar ping there’s not much noticeable difference.
Next we’re expecting integer values in the processing code so when sending values to over the serial port we cast them from float to integer.
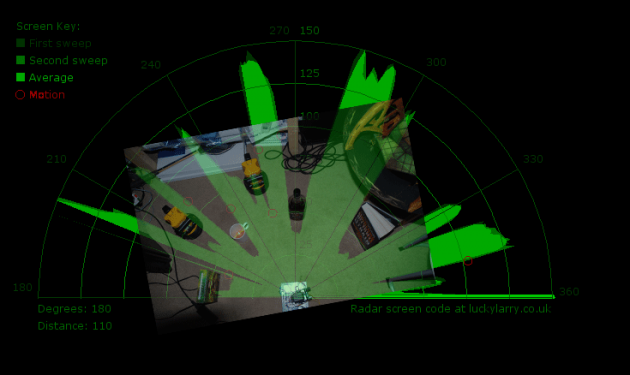
Because the IR sensor has a different range I’ve altered the display to measure only up to 150cm. And becasue of this range limitation, if there is any value recorded outside of this range then we need to handle it to avoid seeing spikes and the same for any value under 20cm we need to also handle this.
To make the display more readable I keep the same size screen and area (radius of 300) and then multiply the sensor values by 2 to magnify them a bit more.
Other than it, it’s basically the same code as before and when we look at the image comparison now between what the sensor records and what is physically there we see a far better match, in some cases it’s a little to accurate.
Arduino sketch
/*
luckylarry.co.uk
Radar Screen Visualisation for Sharp GP2Y0A02 IR range finder
Sends sensor readings for every degree moved by the servo
values sent to serial port to be picked up by Processing
*/
#include <Servo.h> // include the standard servo library
Servo leftRightServo; // set a variable to map the servo
int leftRightPos = 0; // set a variable to store the servo position
const int numReadings = 10; // set a variable for the number of readings to take
int index = 0; // the index of the current reading
float total = 0; // the total of all readings must be a float to allow totaling of float values
int average = 0; // the average
int IRpin = 1; // analog pin for reading the IR sensor
/* setup the pins, servo and serial port */
void setup() {
leftRightServo.attach(9);
// initialize the serial port:
Serial.begin(9600);
}
/* begin rotating the servo and getting sensor values */
void loop() {
for(leftRightPos = 0; leftRightPos < 180; leftRightPos++) { // going left to right.
leftRightServo.write(leftRightPos);
for (index = 0; index<=numReadings;index++) { // take x number of readings from the sensor and average them
float volts = analogRead(IRpin)*0.0048828125; // value from sensor * (5/1024) - if running 3.3.volts then change 5 to 3.3
float distance = 65*pow(volts, -1.10); // worked out from graph 65 = theretical distance / (1/Volts)S - luckylarry.co.uk
total = total + distance; // update total
delay(20);
}
average = (int) total/numReadings; // create average reading CAST TO INT!! remove the decimal places
if (index >= numReadings) { // reset the counts when at the last item of the array
index = 0;
total = 0;
}
Serial.print("X"); // print leading X to mark the following value as degrees
Serial.print(leftRightPos); // current servo position
Serial.print("V"); // preceeding character to separate values
Serial.println(average); // average of sensor readings
}
/*
start going right to left after we got to 180 degrees
same code as above
*/
for(leftRightPos = 180; leftRightPos > 0; leftRightPos--) { // going right to left
leftRightServo.write(leftRightPos);
for (index = 0; index<=numReadings;index++) {
float volts = analogRead(IRpin)*0.0048828125; // value from sensor * (5/1024) - if running 3.3.volts then change 5 to 3.3
float distance = 65*pow(volts, -1.10); // worked out from graph 65 = theretical distance / (1/Volts)S - luckylarry.co.uk
total = total + distance;
delay(20);
}
For more detail: Arduino + Processing – Make a Radar Screen – Part 3: Visualising the Data from Sharp Infrared Range Finder