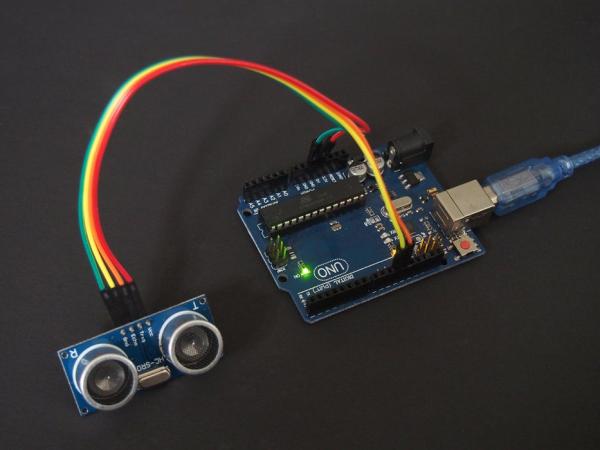
This instructable describes how to create a non-contact range-finder using an Arduino and an HC-SR04 ultrasonic module to measure distances in the range 2cm – 400cm.
The accuracy is typically +/- 3mm depending on distance, air temperature, and humidity.
Step 1: Parts List
Very few parts are required:
- 1 only HC-SR04 ultrasonic module or similar
- 1 only Arduino Uno R3
- 4 only Arduino male-female jumper wires
All items were obtained from https://www.aliexpress.com/
Step 2: Wiring Diagram
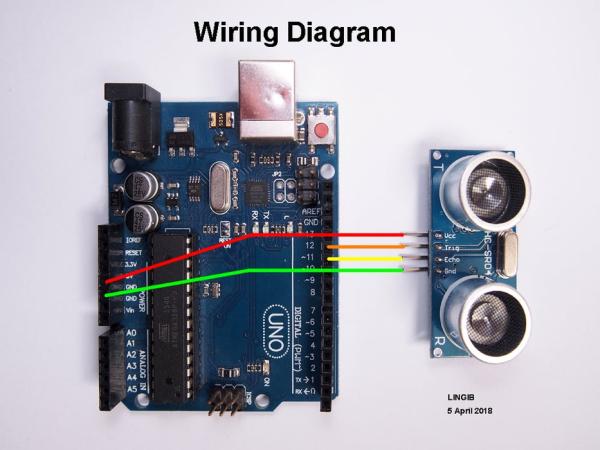
Only four wires are required to complete this project.
The wiring diagram is shown in photo1.
Step 3: Theory

The HC-SR04 ultrasonic range-finder module (photo 1) provides non-contact measurements in the range 2cm – 400cm. The accuracy is typically +/- 3mm depending on distance, air temperature, and humidity.
For greatest accuracy the target area should be at least 0.5 square meters. Best results are obtained when the transducer is pointing directly at the target. Useable results, however, are possible within an imaginary “cone” of +/- 15 degrees.
Interfacing the HC-SR04 to an Arduino is extremely simple as, apart from the two supply pins, only two wires, “Trig” (trigger) and “Echo”, are required.
A 10uS (microsecond) trigger pulse must be applied to the “Trig” pin to start each measurement.
On receipt of a trigger pulse the module emits an eight cycle “burst” at a frequency of 40kHz (kilohertz) after which the “Echo” line goes HIGH. There is a short 430uS interval between the trigger pulse and the rising edge of the “Echo” pin during which time high energy +/-10 volt charges are built up in the transmitter circuit prior to the ultrasonic burst.
The “Echo” pin drops LOW on receipt of an echo signal or 210mS whichever comes first.
[ Note:
If you block the ultrasonic signals (I used a rolled up sock against the transducers), you will observe a distance reading of 3550cm which is outside the sensor range of approximately 400cm.
Beyond 400cm the distance readings will suddenly jump to 3550cm. The reason for this follows:
In normal operation the measure() function completes its measurement in less than 25mS (423cm) then waits a further 25mS until the task scheduler next sets TaskFlag1 “TRUE”.
Should an echo not be received, the task scheduler will continue to set TaskFlag1 “TRUE” every 50mS until the HC-SR04 times out after 210mS and the Echo pin drops low. All 10uS start pulses generated by the measure() function during this time are ignored by the HC-SR04.
The timeout value of 210mS corresponds to a distance of 3550cm … hence the sudden jump in the distance reading.
The important point is that all distance readings less than 400cm are correct. ]
Typical waveforms
Waveforms for 5cm, 10cm, 20cm, and 200cm distances are shown in photos 2,3,4, and 5.
The top trace in each photo is the “Trig” pin … the lower trace in each photo is the “Echo” pin.
The duration of each “Echo” pulse can be calculated by multiplying the trace length by the “uS/div” value shown in the lower-right corner of each photo.
Calculating the distance
The exact distance can be calculated from the formula:
- distance (cm) = pulse-length * speed-of-sound / 2 * 100 ………………………………….. (1)
This assumes that the “speed-of-sound” is 340m/S, and that the echo-distance is twice the actual distance.
The distance can also be calculated using the formula:
- distance (cm) = pulse-length (uS) / 59 ………………………………………………………………….. (2)
The exact distance can be obtained by adjusting the constant value of 59.
[ Note:
The value of 59 for the constant is derived as follows:
The speed of sound is approximately 340m/S which is 0.034cm/uS (centimeters/microsceond).
The reciprocal of 0.034cm/uS is 29.412uS/cm which, when multiplied by 2 to allow for the return path, equals 58.824 or 59 when rounded. ]
Example 1:
Substituting a pulse-length of 2400uS into equation (1) we get:
- distance = 2400/1000000 * 340/2 * 100 = 40.8cm
Example 2:
Substituting a pulse-length of 2400uS into equation (2) we get:
- distance = 2400/59 = 40.7cm
Step 4: The Code
The code comprises a “measure()” function that is called once every 50mS using the task-scheduler described in instructable https://www.instructables.com/id/Multi-task-Your-…
The measure() function comprises the following code:
// ----- generate 10uS start pulse digitalWrite(Trig,HIGH); delayMicroseconds(10); digitalWrite(Trig,LOW); // ----- measure the distance while (!digitalRead(Echo)); //wait for Echo pin to go high start_time = micros(); while (digitalRead(Echo)); //wait for Echo pin to go low finish_time = micros(); time_taken = finish_time - start_time; Distance = ((float)time_taken)/59;
The complete code, “Ultrasonic_range_finder.ino”, is attached.
Copy the contents of this text file to an Arduino sketch, save it as “Ultrasonic_range_finder” (without the quotes), then compile and upload it to your Arduino.
Step 5: Measuring Distances
To view the distance readings click “Tools|Serial Monitor” and set the speed to 115200 bauds.
The distance readings may be calibrated by placing an object along a ruler then adjusting the constant “59” value for “Distance” until an exact reading is displayed.
Click here to view my other instructables.
Source: Ultrasonic Range Finder