This project was completed by Alexandra Pittiglio & Christelle Feghali for our Computational Design and Digital Fabrication ‘Useless Machine’ Project, Semester 2, ITECH M.Sc Programme
——–
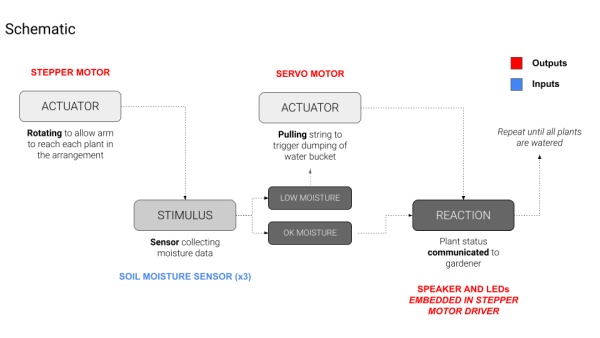
We present Plant Bartender, a 2-axis robot that senses and waters in the most inefficient way.
This device utilizes soil moisture sensors to identify the thirst levels of multiple plants in a radial placement, waters them according to their need, and helps to express their status to the gardener caring for them through Super Mario theme song tunes and LEDs.
Step 1: Concept
Step 2: Material Needed
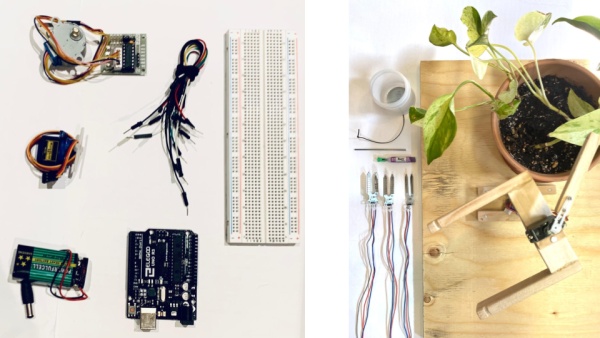
Electronics:
Arduino UnoController Board Breadboard
Motors:
Stepper Motor + ULN2003 Driver Test Module Board
Sensor:
3x Soil Moisture and Humidity Sensor
Power Source:
Body:
- 3x Plants
- Plastic cup for water reservoir: we used an old chewing gum container such as this
- Thin wire or string: taped to underside of water reservoir and fed to the rotational arm on the servo
- Axle for turning water reservoir: we used a small metal axle that was included with one of the motors
- Nails / screws as required for your wooden frame build
- Crazy Glue: used in some areas to secure components together where nails / screws were too large
- Wood for the Robotic Arm: This part is really up to the user. We opted to use salvaged wood from an old drawer set that a neighbour had put to the curb, to save on material and environmental cost. The wood was a thin plywood, and therefore light enough to not weigh down the function of the stepper motor at the base. Ensure to check torque against the expected weight of the robotic arm.
Step 3: Arduino Circuit
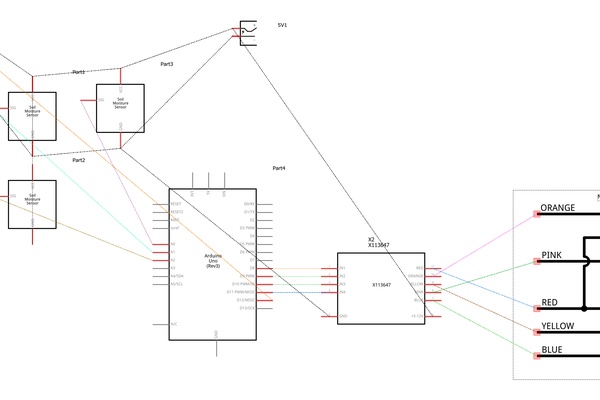
Pin 8: Stepper iN1
Pin 10: Stepper iN2
Pin 9: Stepper iN3
Pin 11:Stepper iN4
Pin 12: Servo
Analog PIN A0: Humidity sensor1 at 45 Degrees
Analog PIN A1: Humidity sensor2 at 135 Degrees
Analog PIN A2: Humidity sensor3 at 315 Degrees
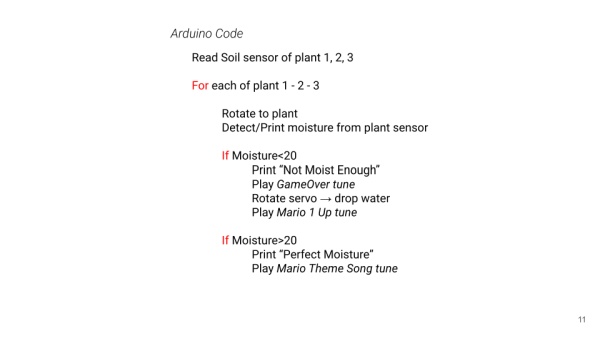
Step 4: Code & Logic
#include <pitches.h>
#include <Servo.h>
#include <Stepper.h>
// SENSOR HUMIDITY
int SENSE1= 0; // Soil Sensor input at Analog PIN A0
int value1= 0;
int SENSE2= 1; // Soil Sensor input at Analog PIN A2
int value2= 0;
int SENSE3= 2; // Soil Sensor input at Analog PIN A3
int value3= 0;
//Melody
#define REST 0
#define NOTE_C5 523
#define NOTE_G4 392
#define NOTE_E4 330
//int speakerPin = 13;
int buzzer=8;
int melody[]={
NOTE_C5,-4, NOTE_G4,-4, NOTE_E4,4 //45 ;
};
int tempo= 200;
int notes = sizeof(melody) / sizeof(melody[0]) / 2;
// this calculates the duration of a whole note in ms
int wholenote = (60000 * 4) / tempo;
int divider = 0, noteDuration = 0;
int length = 1;
// MOTOR
int numberofstep = 48;
Stepper myStepper(numberofstep, 8, 10, 9, 11);
Servo myservo2;
void setup()
{
Serial.begin(9600);
delay(10000);
Serial.println(“ROBOT READY…”);
Serial.println(“—————————–“);
delay(5000);
Serial.println(“SOIL MOISTURE SENSOR”);
Serial.println(“—————————–“);
delay(5000);
myStepper.step(0);
myStepper.setSpeed(200);
myservo2.attach(12);
//myservo2.write(75);
}
void loop()
{
value1= analogRead(SENSE1);
value1= value1/10;
value2= analogRead(SENSE2);
value2 =value2/10;
value3= analogRead(SENSE3);
value3= value3/10;
int Moist[3] = {value1,value2,value3};
//MOVING BASE MOTOR
for( int i=0 ;i<=2;i++){
if (i == 0) {
myStepper.step(-500);
Serial.println(“Moving to Plant Base 0”);
delay(5000);}
if (i == 1) {
myStepper.step(-450);
Serial.println(“Moving to Plant Base 1”);
delay(5000);}
if (i == 2) {
myStepper.step(-650);
Serial.println(“Moving to Plant Base 2”);
delay(5000);}
//READING HUMIDITY
Serial.print(“Moisture of plant “);
Serial.print(i);
Serial.print(“: “);
Serial.print(Moist[i]);
Serial.print(” % “);
if (Moist[i] <= 20) {
Serial.println(“Not moist enough”);
// Play NEGATIVE Melody
for (int thisNote = 0; thisNote < notes * 2; thisNote = thisNote + 2) {
divider = melody[thisNote + 1];
if (divider > 0) {
noteDuration = (wholenote) / divider;
} else if (divider < 0) {
noteDuration = (wholenote) / abs(divider);
noteDuration *= 1.5; // increases the duration in half for dotted notes
tone(buzzer, melody[thisNote], noteDuration * 0.9);
delay(noteDuration);
noTone(buzzer);}
}
//WATER DROPPING
myservo2.write(15);
delay(3000);
// Play 1-up sound FINISHING TO DRINK
tone(8,NOTE_E6,125);
delay(130);
tone(8,NOTE_G6,125);
delay(130);
tone(8,NOTE_E7,125);
delay(130);
tone(8,NOTE_C7,125);
delay(130);
tone(8,NOTE_D7,125);
delay(130);
tone(8,NOTE_G7,125);
delay(125);
noTone(8);
delay(3000); // pause 3 seconds
myservo2.write(75);}
if ( Moist[i]> 20) {
Serial.println(“Perfect Moisture!”);
// WHEN Moist
tone(8,660,100);
delay(150);
tone(8,660,100);
delay(300);
tone(8,660,100);
delay(300);
tone(8,510,100);
delay(100);
tone(8,660,100);
delay(300);
tone(8,770,100);
delay(550);
tone(8,380,100);
delay(575);
tone(8,510,100);
delay(450);
tone(8,380,100);
delay(400);
tone(8,320,100);
delay(500);
tone(8,440,100);
delay(300);
tone(8,480,80);
delay(330);
tone(8,450,100);
delay(150);
tone(8,430,100);
delay(300);
tone(8,380,100);
delay(200);
tone(8,660,80);
delay(200);
tone(8,760,50);
delay(150);
tone(8,860,100);
delay(300);
tone(8,700,80);
delay(150);
tone(8,760,50);
delay(350);
tone(8,660,80);
delay(300);
tone(8,520,80);
delay(150);
tone(8,580,80);
delay(150);
tone(8,480,80);
delay(500);
tone(8,510,100);
delay(450);
tone(8,380,100);
delay(400);
tone(8,320,100);
delay(500);
tone(8,440,100);
delay(300);
tone(8,480,80);
delay(330);
tone(8,450,100);
delay(150);
tone(8,430,100);
delay(300);
tone(8,380,100);
delay(200);
tone(8,660,80);
delay(200);
tone(8,760,50);
delay(150);
tone(8,860,100);
delay(300);
tone(8,700,80);
delay(150);
tone(8,760,50);
delay(350);
tone(8,660,80);
delay(300);
tone(8,520,80);
delay(150);
tone(8,580,80);
delay(150);
tone(8,480,80);
delay(500);
}
if (i == 2) {
myStepper.step(1600);
Serial.println(“Moving Back to Base”);
delay(10000);}
}
}
Source: Plant Bartender