Summary of How to make a Smart Cane for the Visually Impaired with Arduino
This article describes an open-source Arduino Smart Cane project designed to help visually impaired individuals navigate independently. The cane uses an ultrasonic sensor to detect obstacles and provides feedback via a vibration motor and buzzer, alerting the user to nearby objects. The device is cost-effective (around $10 to build) and made from easily available components, including a salvaged vibration motor from an old cellphone. The project emphasizes simplicity and accessibility, enabling even beginners to replicate it within a few hours.
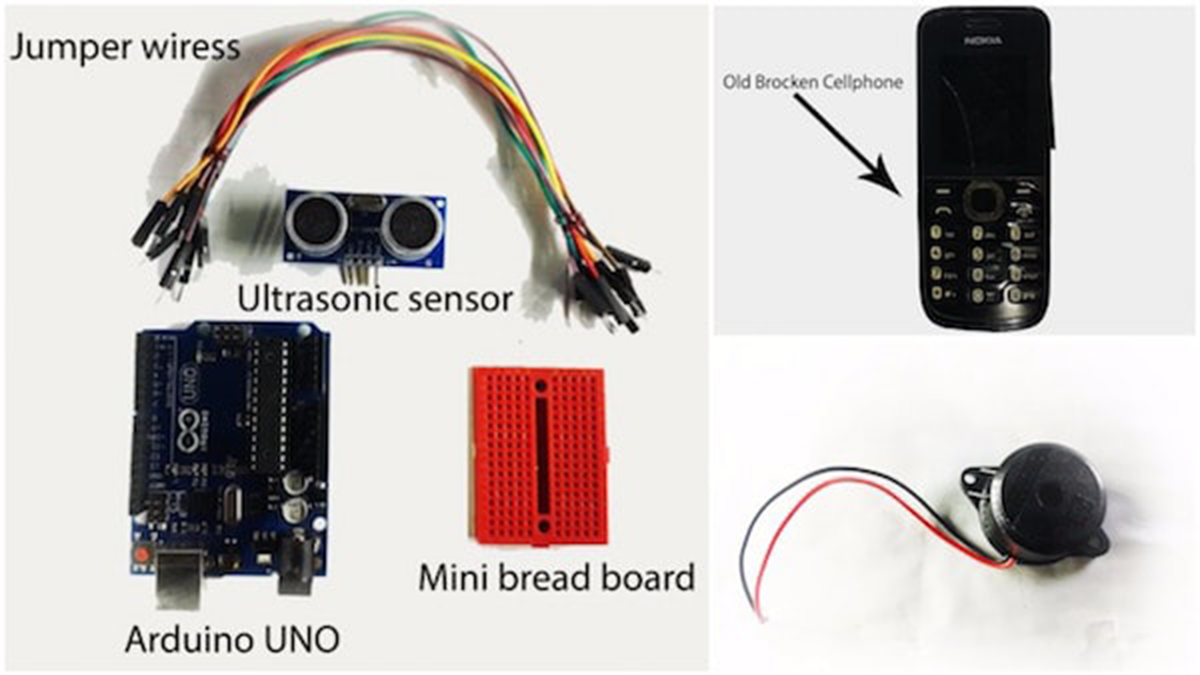
Parts used in the Arduino Smart Cane project:
- Arduino Uno
- Ultrasonic sensor (HC-SR04)
- Mini breadboard
- 9 volt battery
- 9 volt battery connector
- DC male power jack
- Buzzer
- Jumper wires
- Vibration motor (salvaged from a broken cellphone)
- Toggle switch
I wanted to make something for them to help the visually impaired become independent, so I created an open source Arduino project for a Smart Cane. This Arduino smart cane can assist with walking alone in new environments by taking inputs through an obstacle sensor (ultrasonic sensor) and providing feedback to the person through haptics (vibration motor). Check out the video below for the demo and working.

One day while I was walking to my college, I witnessed a blind person who was walking through the street. He was facing difficulty in walking in through that busy street. Fortunately, I was able to help him at that time. However, it was at that moment that I had an epiphany, I realized that I could use technology to assist people like him. It was that evening that I came up with this idea: The Smart Cane. I wanted it to be very cheap and easily replicable so that even a kid can make it easily in a couple of hours from scratch.
Using this Arduino Smart Cane, a visually impaired person can walk without anyone’s help. The cane can automatically detect the obstacle in front of the person and give them a feedback response by vibrating the walking stick and giving a warning sound. Through this tool, the blind person thus be aware of the obstacles in front of them. I used an Ultrasonic sensor with an Arduino for detecting the obstacles. It cost me just 10$ to make one. It is cheap and also easy to make without the need of much soldering. Now let’s get started!
Required Materials
- An Arduino uno.
- An Ultrasonic sensor (HCSR04).
- Mini breadboard.
- 9 volt battery.
- 9 volt battery connector.
- DC male power jack.
- A Buzzer.
- Some jumper wires.
- A broken cellphone (for the vibration motor).
- A Toggle switch.
Other tools needed:
- 3/4 inch diameter PVC pipe (used for making the walking stick).
- 3/4 inch diameter PVC elbow.
- Insulation tape.
- Some small screws for mounting Arduino.
- Screwdriver.
- Utility knife.
- Instant adhesive Glue.
- A Box to put your Arduino and other electronics.
How Does it Work?

The technology behind the Arduino Smart Cane is pretty straight forward. There are mainly three blocks behind it: input, controller, and output. The input consists of an ultrasonic sensor that is capable of detecting obstacles in front of it at a range of up to 400cm. It is interfaced to a controller: the Arduino which determines if an obstacle is too close to the cane and triggers the output if it is. The output consists of a vibration motor to provide haptic response and a piezo buzzer. If you want to learn more about the ultrasonic sensor and interfacing it to an Arduino, check out this DIY Hacking tutorial from Jeff Salim.
Salvaging the Vibration Motor from A Cellphone
After finding a broken cell phone, we need to remove the vibration motor from it. You will have to do this step with care and patience. I used a micro vibrator motor from an old broken cell phone that was lying around my home. I have used this because of its very small size and as it works with low voltages.
Read More: How to make a Smart Cane for the Visually Impaired with Arduino