Summary of DIY Parking Sonsor using Arduino
This article details a DIY parking sensor project using an Arduino to prevent garage vehicles from hitting walls. The system employs an ultrasonic range finder to measure distance and a tri-color LED to provide visual cues: green for safe distance, blue for approaching close proximity (24 inches), and red for stopping (6 inches). The tutorial covers hardware assembly, including wiring the sensor and LED to the Arduino, and software customization to adjust measurement units and timing intervals.
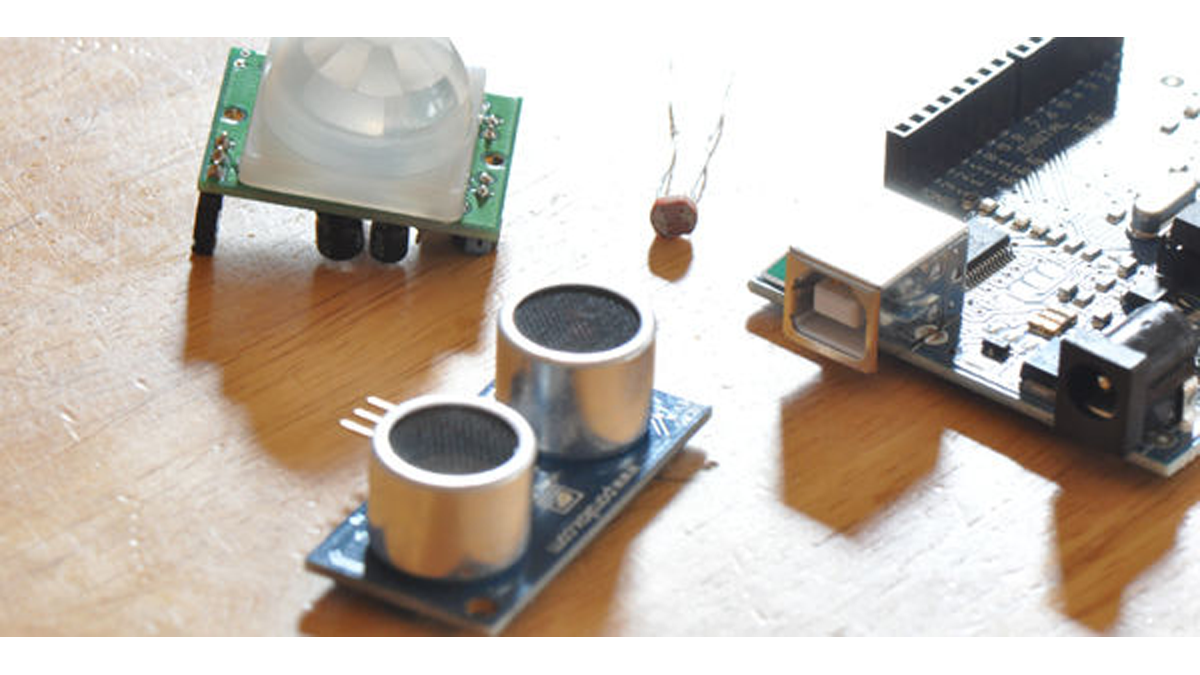
Parts used in the DIY Parking Sensor:
- Arduino (Duemilanove)
- Ultrasonic Range Finder
- Wire
- Small box
- 9V power supply
- Tri Color LED
- Hot Glue Gun
- Breadboard
The last time I was home visiting my parents I noticed bumper imprints caused by my mother suburban on the stairs leading up from the garage. Their garage it turns out is just barely long enough to fit their gigantic vehicles. So I decided it would be nice to have some visual cue for parking. Out came the arduino and a sonar range finder from Radio Shack and the result was this tutorial.
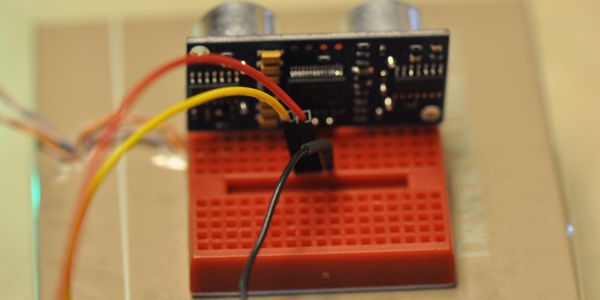
- Hot glue the arduino to the bottom of the box and run the power supple to it
- Connect the 5V and Ground wires to the range finder.
- Connect the Pulse cable from the range finder to a “PWM” input on the arduino (this is necessary because we’ll be sending pulses through the same leed that we listen for a return on). I used digital pin 7 with PWM for the pulse connection.
- Test the tri color LED to find out which connectors make which colors. You will need to keep track of which wire creates which colors and connect them to three digital pins on the arduino. Keep track of the pin numbers. For instance, I connected to digital pins 11, 12 and 13 with red, green and blue respectively.
- Once you have everything connected we’ll start writing the program. After your finished with the programming and you’re sure it works, it’s a good idea to seal everything up in the box to make sure none of the wires get disconnected before you mount the sensor to your wall.
Programming
Luckily, Arduino already provides an example of how to use the pulse sonar sensor. Select the File -> Examples -> Sensors -> Ping example in the Arduino programming kit. Once open, select the code and copy it to a blank sketch. Save the new project under sketches I used the name “parking Example”.
Now we have something to work with. Begin customizing the code. First, we are only going to be measuring inches, not cm so lets comment out the code snippet about halfway down that runs a function to calculate cm. Comment out:
|
1
|
//cm = microsecondsToCentimeters(duration); |
Next we don’t need to send sonar pings out at such a high interval. We only need to ping about every second because the car will (hopefully) be moving slowly into the garage. So at the bottom of the loop function set the delay to 1000:
|
1
|
delay(1000); |
Next we need to tell arduino which pins we’ll be using for our LED output. At the top where we have:
const int pingPin = 7; |
We’ll add:
|
1
2
3
|
pinMode(13, OUTPUT); // bluepinMode(12, OUTPUT); // greenpinMode(11, OUTPUT); // red |
Now that ardiuno has a setup for those pins, we’ll need to send a signal whenever we want that color to show. So After receiving the signal from our ping, we’ll compute the distance and if it falls within certain ranges we’ll show a specific color. I want the driver to see green until they get within 24 inches of the wall, at that point, I want the light to turn blue, signaling that they are getting closer. Then when they are within 6 inches of the wall, the red light should turn on, indicating to the driver that they should stop.
- Arduino (I had a duemilanove available)
- Ultrasonic Range Finder
- Wire
- Small box
- 9V power supply (You can find old power supplies for cheap at thrift stores)
- Tri Color LED
- Hot Glue Gun
- Breadboard
For more detail: DIY Parking Sonsor using Arduino
- How do I connect the Pulse cable from the range finder?
Connect it to a PWM input on the Arduino, such as digital pin 7. - What is the best way to determine which wire creates which LED color?
Test the tri-color LED individually before connecting it to keep track of the pin numbers. - Can I change the code to measure inches instead of centimeters?
Yes, you should comment out the function that calculates centimeters. - How often should the sonar ping be sent?
Set the delay to 1000 milliseconds to ping about every second. - Which pins are used for the red, green, and blue LEDs?
The example uses digital pins 11 for red, 12 for green, and 13 for blue. - At what distance does the light turn blue?
The light turns blue when the car is within 24 inches of the wall. - When should the driver stop based on the red light?
The red light indicates the driver should stop when they are within 6 inches of the wall. - Why should I seal everything up in the box?
Sealing the box ensures none of the wires get disconnected before mounting the sensor. - Where can I find the example code for the pulse sonar sensor?
Select File, then Examples, Sensors, and finally Ping example in the Arduino programming kit.