Summary of Create an Android Controlled Robot Using the Arduino Platform
This DIY project enables users to build an Android-controlled robot car using a smartphone app without prior programming experience. The system utilizes Bluetooth communication between the phone and an Arduino board, which processes ASCII commands to drive two continuous rotation servo motors for movement in various directions.
Parts used in the Android Controlled Robot:
- Arduino / Arduino Clone or custom board
- Two continuous rotation servo motors
- 5v TTL -UART Bluetooth module (JY-MCU BT_BOARD or Bluesmirf Gold/Silver)
- Ball caster
- Two robot wheels
- Acrylic chassis board
- Four AA Duracell batteries and battery holder
- Hot glue/super glue
- Double sided tape
Ever wanted to make an Android controlled robot or car? Control your RC car with a smartphone? Or wanted a tutorial about connected devices and getting started with it? Now you can do that with this simple DIY hack that even provides you with a free Android application, thus it doesn’t require you to have any experience in Android application programming. Download the free application to your phone and start controlling your robot. Have fun with this DIY hacking tutorial!
Required Materials
Hardware :
- Arduino / Arduino Clone or make your own custom Arduino board.
- Two continuous rotation servo motors like this: Continuous rotation servo
- A 5v TTL -UART Bluetooth module like: JY-MCU BT_BOARD (Cheaper) or Bluesmirf Gold/Silver
- Ball caster
- Two robot wheels like this, select wheels after checking if they fit in the servo: Robot wheels
- Chassis, usually a small acrylic board will do.
- Four AA Duracell batteries and battery holder.
Software :
- Arduino IDE
- Eclipse for android programming (optional, not required). For instructions on installing and setting up the environment, read How to install android and eclipse and tutorials to begin learning Android programming even though you don’t require it for this project.
How Does it Work?
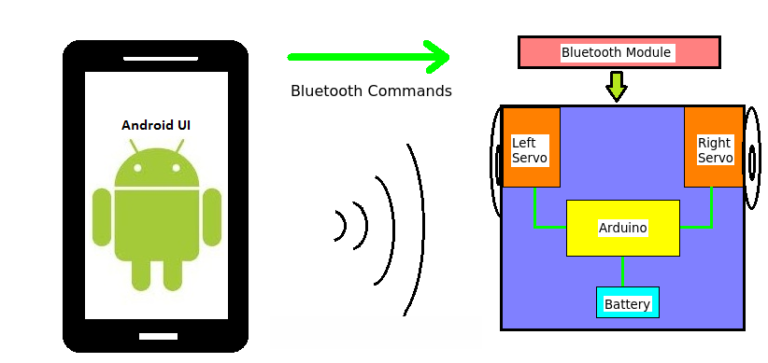
The Android application controlled robot communicates via Bluetooth to the Bluetooth module present on the robot. While pressing each button on the application, corresponding commands are sent via Bluetooth to the robot. The commands that are sent are in the form of ASCII. The Arduino on the robot then checks the command received with its previously defined commands and controls the servo motors depending on the command received to cause it to move forward, backward, left, right or to stop. Thus allowing us to create an Android controlled robot. Basic block diagram:
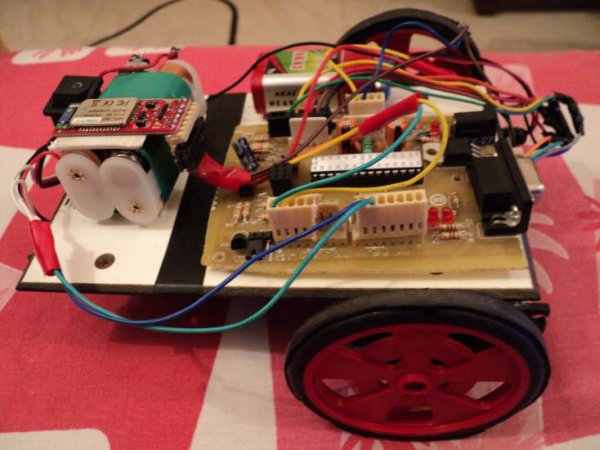
Assembling the Components for the Android Controlled Robot
Take the piece of acrylic board and stick the servo motors to the left and right edges using hot glue/super glue. Then attach the ball caster. On the top side, stick the Arduino board using double sided tape, do the same for the battery holder.
Setting up the connections for the Android Controlled Robot
Setup the hardware connections with the Arduino and the servo motors. The continuous rotation servo motors are those kinds of servo motors that cannot be controlled or set at a particular angle, unlike normal servos. Servos have three wires coming from them: Red- Power, Black -Ground, White/Yellow- PWM /PPM Signal. The left servo motor (white/yellow wire) is hooked up to Arduino digital pin 9 and the right servo motor (white/yellow wire) Arduino digital pin 10. The black wires of both the motors are connected to Arduino GND and the Red wires to the positive terminal of the battery holder. Connect the RX pin of the Bluetooth module to TX pin (digital pin 1) on the Arduino and the TX pin on the module to the RX pin on the Arduino (pin 0). Connect Vcc and Gnd of the module to the Arduino. Connect the negative terminal of the battery holder to Arduino GND. The connections will look like this:
Read More: Create an Android Controlled Robot Using the Arduino Platform
- Do I need experience in Android application programming?
No, this tutorial provides a free Android application so no programming experience is required. - How does the robot receive commands from the smartphone?
The Android application sends ASCII commands via Bluetooth to the Bluetooth module on the robot. - What type of servo motors are used for this project?
Two continuous rotation servo motors are used instead of normal servos that stop at specific angles. - Which Arduino pins connect to the servo motors?
The left servo connects to digital pin 9 and the right servo connects to digital pin 10. - How are the Bluetooth module wires connected to the Arduino?
The RX pin of the module connects to TX pin 1, and the TX pin connects to RX pin 0 on the Arduino. - Can I use a different brand of batteries for the power source?
The article specifically lists four AA Duracell batteries as the required power source. - What material is recommended for the robot chassis?
A small acrylic board is usually sufficient for the chassis. - Does the Eclipse IDE require installation for this project?
Eclipse is optional and not required since the free Android app handles the control interface.