In this project I am controlling my three automation projects using single application made by me using MIT app inventor platform.
Description
As we all know that the world is slowly shifting towards automation, we require automation everywhere, like in industries, factories, houses, energy management systems etc. and also it is very important for us to have only single interface(app) to control all our automation projects. This will not only save our memory but also will be reliable and easy to use.
My project comprises of three automation projects. These 3 projects can be controlled using single app. Each project has respective application in its field.
- Home Automation: Smart Cities
- Voice Controlled Bot: Industrial / Factory automation
- Robotic Arm: Industrial / Factory automation
I implemented my idea by making a user friendly application using the MIT app inventor. I have used this application for controlling 3 projects namely
1) Home Automation
2) Voice Controlled Bot
3) Robotic Arm
We can also add more number of projects and control them through one single app.
All the three projects use Arduino UNO and Bluetooth module. With the help of mobile application we send commands to the bluetooth module which communicates with Arduino through serial communication and sends the data for further processing. Using Arduino code, after we receive particular characters or numbers from the Bluetooth module, we further take the required actions.
I have compiled 3 automation projects which can be controlled through
single application and which have their own respective potential applications. The common hardware and software used for all the 3 projects are as follows:
Hardware used:
Arduino Uno, HC-05 Bluetooth module, Servo motor, BO motor (300rpm), L293d motor driver IC, Relay module, power supply.
Software used:
Arduino IDE, MIT app inventor.
I used Arduino IDE for programming the Arduino UNO.
MIT app inventor was used for making the mobile application.
The brain of the system is Arduino Uno, which uses ATmega 328p microcontroller for controlling all the actions in all the three projects.
HC-05 bluetooth module is used for Bluetooth communication between our smartphone and arduino board.
Each project also required some extra hardware. Some of the important hardware are as mentioned below:
- Home automation:- relay module for controlling high voltage Ac . bulb using 5V dc signal
- Voice controlled bot:- BO motor for the motion of the bot
L293d motor driver IC to drive the BO motors
- Robotic arm:- Servo motor for controlling the movement of the arm
Circuit Diagram:
Each project has its own circuit diagram as shown in the images.
The important and common part of all the circuits is the connection of Arduino Uno and HC-05 module. The connections are as follows
- Vcc of HC-05 module is connected to 5 V pin of Arduino
- GND of HC-05 is connected to GND of Arduino
- Tx pin of HC-05 is connected to Rx of Arduino
- Rx pin of HC-05 is connected to Tx of Arduino
Home Automation:-
In this I have connected the relay’s signal pin with Arduino’s digital pin 10. The bulb’s one of the wire is cut in between and the two ends are connected between common terminal and the NO (Normally Open) contact of the relay.
Voice controlled bot:-
In this we use L293d motor driver IC to drive the two BO motors. The BO motors are interfaced with the driver IC and the IC with the Arduino. With the help of driver we can rotate the motors in both the directions. The 4 control pins of the driver IC are connected to the digital pins 3,4,5,6 of the arduino. The actuator pins of the driver are connected to the respective motor terminals.
3)Robotic arm:-
In this I have used servo motors for controlling the movement of the arm. Servo motors require PWM signal for its actuation. So the signal pins of servo are connected to the PWM pins of Arduino 6, 9 and 10.
MAKING THE PROJECT:
HOME AUTOMATION:
For illustrating the control of home appliances, I have used light bulb connected to the 230V supply. I cut one of the wire and connected relay module in between which provides the control.
VOICE CONTROLLED BOT:
I used thermocol(waste) as the chassis of the bot. I mounted all of the electronic components over it in proper manner. I did the connections as per the circuit diagram, attached the wheels to the motor. I kept a mobile box as the cover for all the components for a good look. There is a switch provided for switching on the supply to the components .
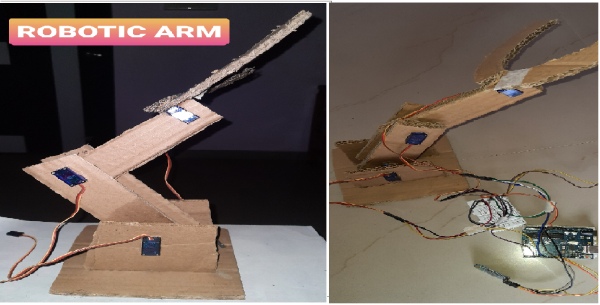
ROBOTIC ARM:
I made the robotic arm from the waste carboard. Placing the 3 servo motors at appropriate places and connecting them as per the circuit diagram I made a robotic arm .
Source: CONTROLLING MY THREE AUTOMATION PROJECTS USING SINGLE MOBILE APPLICATION