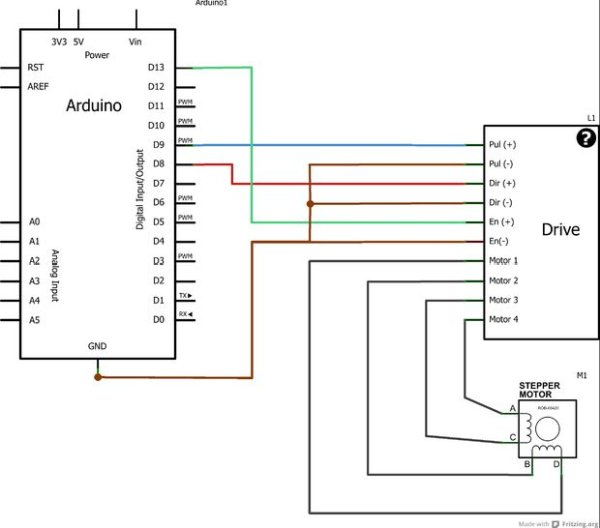
Lots of People want to build Them own small Cnc machine . they started with drives stepper motor but they stacked in controller Programming . In this instructable Robokits will provide Resource to control your Stepper motor with Arduino . before Programming we have to learn some basics Related to Stepper motor .
What is stepper motor ?
A stepper motor is a brushless, synchronous electric motor that converts digital pulses into mechanical shaft rotations. Each rotation of a stepper motor is divided into a set number of steps, sometimes as many as 200 steps. The stepper motor must be sent a separate pulse for each step. The stepper motor can only receive one pulse and take one step at a time and each step must be the same length. Since each pulse results in the motor rotating a precise angle typically 1.8 degrees you can precisely control the position of the stepper motor without any feedback mechanism.
As the digital pulses from the controller increase in frequency, the stepping movement converts into a continuous rotation with the velocity of the rotation directly proportional to the frequency of the control pulses.
Types of Stepper Motors
There are three kinds of step motors: permanent magnet, hybrid, and variable reluctance. Hyrbrid step motors offer the most versatility and combine the best characteristics of variable reluctance and permanent magnet stepper motors. Hybrid stepper motors are constructed with multi-toothed stator poles and a permanent magnet rotor. A standard hybrid stepper motor has 200 rotor teeth and rotates 1.8 degrees per step.
Half Step means that the stepping motor is rotating at 400 steps per revolution (0.9 degree steps x 400 = 360 degrees). First one winding is energized and then two windings are alternately energized. This will cause the rotor of the stepping motor to move at half the distance (0.9 degrees). In half-step mode, a typical stepper motor provides about 30% less torque, but it provides a smoother motion than it would in full-step mode.
Microstep
Microstepping energizes the stepper motor winding in a manner that further subdivides the number of positions between poles. Some microstepping controllers are capable of dividing a full step (1.8 deg) into 256 microsteps. This would result in 51,200 steps in one revolution (.007 deg/step). Microstepping is usually applied to applications that require accurate positioning and smoother motion over a broad range of speeds. As in the half-step mode, microstepping reduces torque by about 30% compared to full-step mode.
Read more: Control Nema Stepper Motor With Arduino