Summary of CARduino – Arduino-Powered, LabVIEW-Controlled Vehicle
The CARduino is a remote-controlled vehicle powered by an Arduino and controlled via LabVIEW software. The project offers two configurations: a wireless version using Xbee modules and a tethered wired version. It allows users with basic electronics knowledge to build, program, and expand the vehicle's features easily, including adding sensors or modifying the controller interface without advanced programming skills.
Parts used in the CARduino:
- Arduino or Arduino-compatible board
- L298N Motor Driver Module or Arduino Motor Shield
- Wire
- FTDI-USB Dongle
- Battery (12V pack or single 12V battery)
- Motors (2) with wheels
- Game controller with USB adaptor
- Xbee Module (2)
- Xbee Breakout Board
- 10uF Capacitors (2)
- 20K Resistor
- 10K Resistor
- LM117 3.3V Regulator
- Long USB female-male cable
- Caster
- Soldering equipment
- Wire Strippers
- Wire Cutter
- Drill and/or Dremel
The CARduino is a remote-operated vehicle which is controlled by a controller attached to a computer running LabVIEW. The vehicle is powered by the Arduino, and can be expanded upon through the addition of sensors or other devices. Using LabVIEW, one can easily modify the controller program and expand the features of the CARduino with very little or no programming experience.

Two different versions of the vehicle will be covered in this Instructable. The first is a wireless Xbee-equipped version, and the second is a tethered, wired version.
The tethered version is slightly cheaper but is suitable for little more than demonstration purposes but it’s still a fun project. Additionally, the tethered version could be upgraded in the future to support wireless communication.
This Instructable assumes that the reader has at least basic knowledge of circuits and electronic construction.
Because you may use different controllers or Arduino boards, you may have to alter the LabVIEW program or VI (Virtual Instrument). To do this, it may be necessary to learn the basics of LabVIEW.
Step 1: Recommended Reading
Before we get started, it may be important to familiarize yourself with a few things. Skip this step if you’re comfortable with everything.
Getting Started With LabVIEW – http://www.ni.com/pdf/manuals/373427c.pdf
Configuring XBees – http://www.instructables.com/id/Changing-Xbee-Baud-Rates/
Step 2: What You’ll Need
~Software
-Arduino IDE – http://arduino.cc/en/Main/Software
-LabVIEW – http://www.ni.com/labviewse/compare/
-LabVIEW Interface For Arduino Toolkit – http://sine.ni.com/nips/cds/view/p/lang/en/nid/209835
-X-CTU for wireless version –
~Electronics
-Arduino or Arduino-compatible
-L298N Motor Driver Module (or Arduino Motor Shield)
-Wire
-FTDI-USB Dongle or similar (with required driver software)
-Battery
-Motors (2) with wheels
-Game controller with associated USB adaptor if applicable
~~Wireless Version
-XBee Module (2)
-XBee Breakout Board
-10uF Capacitors (2)
-20K Resistor
-10K Resistor
-LM117 3.3V Regulator
~~Tethered/Wired Version
-Long USB female-male cable
~Body
-Various hardware and scrap metal (or an RC car body)
-Caster
~Tools
-Soldering equipment
-Wire Strippers
-Wire Cutter
-Drill and/or Dremel with appropriate bits and taps for building the body (May not be necessary if an old RC car chassis is used)
Step 3: Program the Arduino
To allow LabVIEW to communicate with the Arduino, you will need to upload the LIFA_Base firmware to the Arduino. This is included with the LabVIEW Interface for Arduino Toolkit.
Step 4: Vehicle Circuit
Both the wireless and tethered circuit diagrams are shown below.
I used a Boarduino instead of a standard Arduino. It is still 100% compatible with Arduino microcontrollers. If you are using an Arduino with a motor shield or an XBee shield, you may need to omit some of the circuit below.
Step 5: Battery Pack
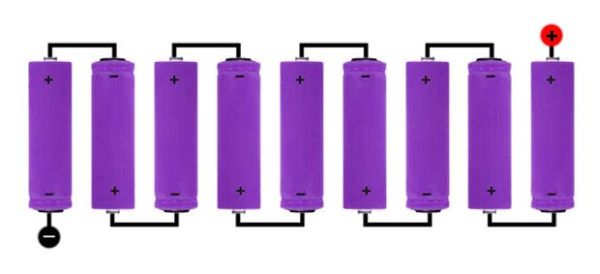
The power source is a 12V battery pack. A single 12V battery could also be used. Just make sure your battery can supply enough current to power your motors. The battery pack in my particular design is made from ten 1.2V rechargeable AA batteries. (10*1.2V=12V)
To make a 12V battery pack from 1.2V cells, they must be connected in series as shown in the picture. If building a pack from ten 1.2V cells, ensure that they all have the same capacity. Higher capacities will allow your CARduino to drive longer without needing to recharge it.
Step 6: Body
The vehicle’s body can be assemble from scratch using scrap materials or a discarded RC car body. The body of my particular design is a roughly triangular piece of sheet metal bolted onto a T-shaped frame of 80/20 aluminum extrusion. Two other pieces of metal were bolted to the frame to provide a place to attach the caster.
The drive motors will be mounted at the front of the body. In my case, I used hose clamps to hold my motors in place. I put a small piece of rubber between the clamps and the motors to prevent slipping, and tightened the hose clamps. You may wish to use other means to secure your motors or you might not have to if they’re already built into an RC car chassis. At the back of the vehicle, I used a caster to allow for maximum maneuverability.
Next, you will probably want to put some standoffs on the body to mount the Arduino and circuit boards. You will also need to mount your battery on the vehicle. I was able to fit my battery pack under the circuit board. I used four neodymium magnets to hold it in place.
Step 7: Transmitter
For the wireless version, a transmitter must be built. This transmitter will be connected to the computer running the LabVIEW VI.
This transmitter can be replaced with a similar device such as an XBee Explorer.
I built my transmitter on a piece of perfboard, using female headers to plug the FTDI dongle into, as well as to provide a socket for the XBee breakout board.
For more detail: CARduino – Arduino-Powered, LabVIEW-Controlled Vehicle
- What software is required to control the CARduino?
You need the Arduino IDE, LabVIEW, the LabVIEW Interface for Arduino Toolkit, and X-CTU for the wireless version. - Can I modify the controller program without programming experience?
Yes, using LabVIEW allows you to easily modify the controller program and expand features with very little or no programming experience. - How do I power the motors for the CARduino?
The power source is a 12V battery pack, which can be made from ten 1.2V rechargeable AA batteries connected in series. - Which motor driver module should I use?
You can use an L298N Motor Driver Module or an Arduino Motor Shield. - How are the motors secured to the body?
Motors can be held in place using hose clamps with a small piece of rubber between the clamps and motors to prevent slipping. - What is the best way to attach the caster to the vehicle?
You bolt pieces of metal to the frame to provide a place to attach the caster at the back of the vehicle. - Does the tethered version support wireless communication?
The tethered version is suitable for demonstration purposes but can be upgraded in the future to support wireless communication. - How do I make the transmitter for the wireless version?
You can build the transmitter on a perfboard using female headers to plug the FTDI dongle into and to provide a socket for the XBee breakout board.