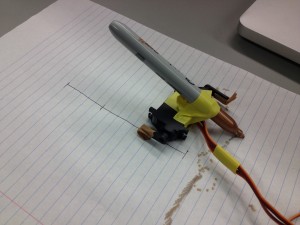
We built a mini-crawler robot that draws a path behind it to make interesting designs. We chose this design for a variety of reasons. First and foremost, we experimented with attaching our other materials to the motors, and most of them were too heavy for the motors to handle. In particular, we wanted to use the DC motor to drive a wheel, but all materials were too heavy for it. For this reason using the slinky or other toys was not an option. We also liked the idea of combining the two servos to make legs, and adding the marker on top was interesting because we could visually track even minimal movement. In the end, we liked the cool random patterns that our Art-duino made. That being said, it moves more slowly than we would have liked, because it was very difficult to deal with the friction and the lack of forward power. Because the servos can only turn 180 degrees, we had to find some way to allow the arms to reset to their original positions, without moving the Art-duino backwards. Our solution to this were the “paws” (see sketch), which were good at battling the friction, but not too great. Since the two servos push the bot alternately forward and backwards, the paws create an asymmetry by increasing the force due to friction in the forward direction. We also wish we could make the motion more deterministic, although the randomness creates cool images.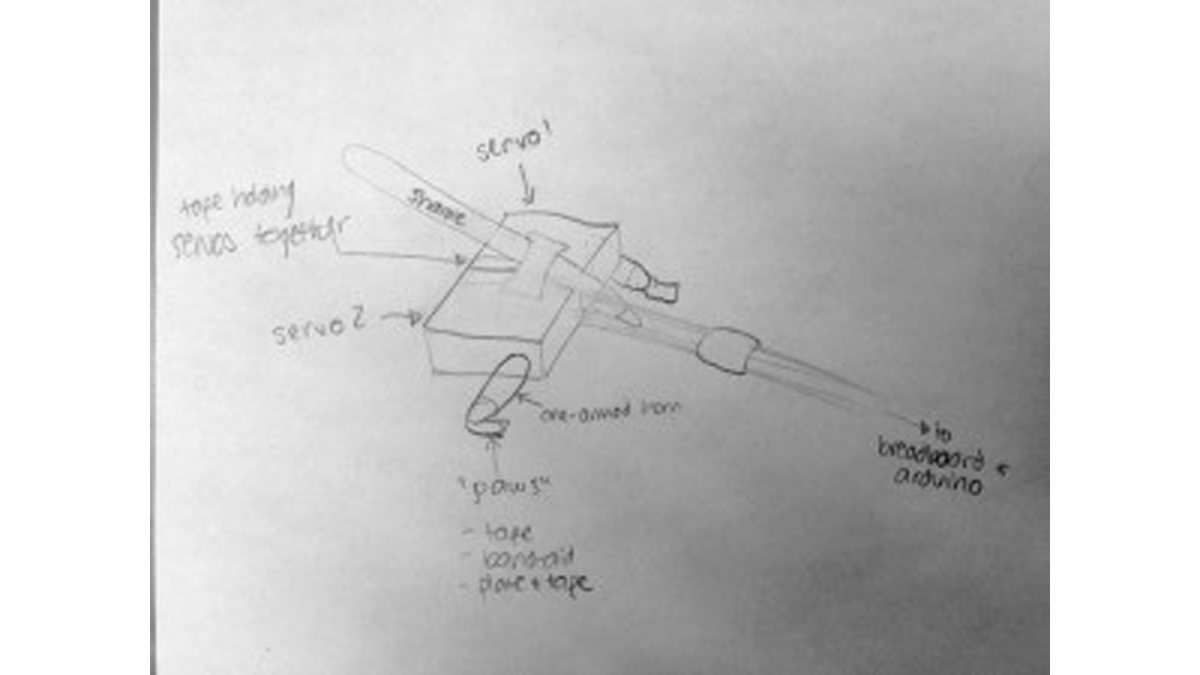
Brainstorming
- We have an android doll. We could put cardboard underneath, and give it wire spools to make it roll.
- We have a string of beads which turns, and whatever is at the end of the chain is the robot, like a puppy!
- String of wire, with a motor attached to one end, as it winds the spool the robot will climb, like a spider!
- We have a little music box. Our robot would have a piezo sound sensor, and it would move when it heard music
Read More: Art-duino