Arduino Quadruped Robot – Stalker
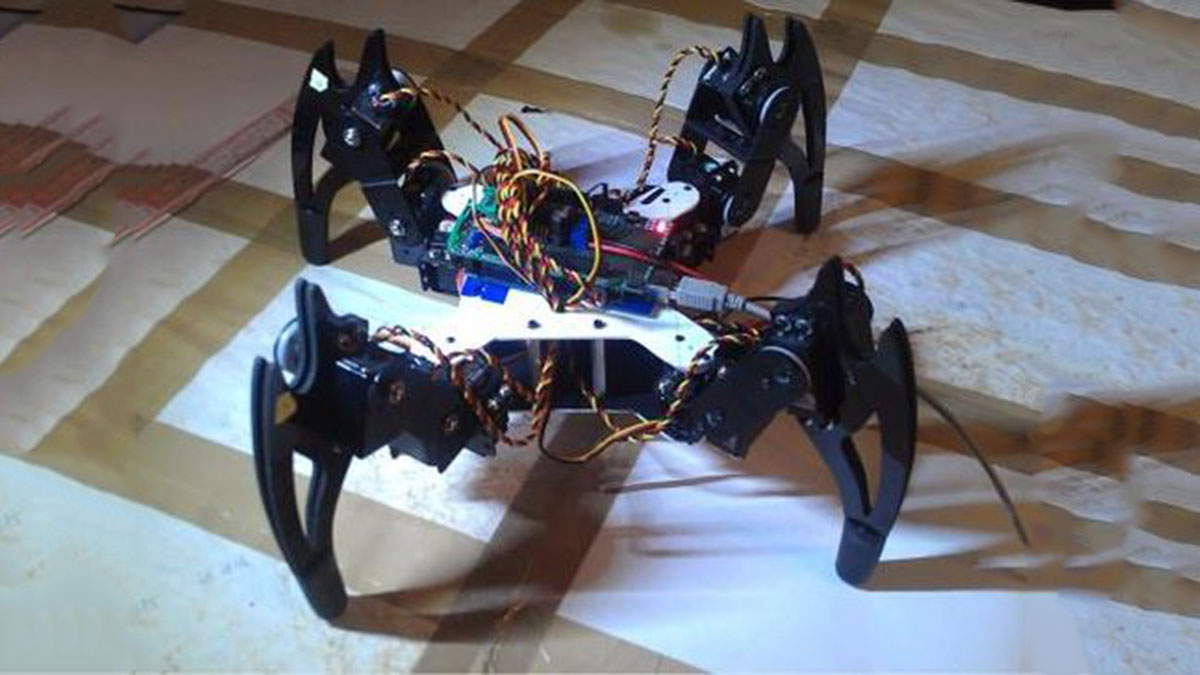
I am going to build an Arduino Quadruped Robot. As usual, I will share my source code and show as many pictures as possible, to help those of you who are also building Quadruped robots. The way I do things might not be the best ways, and I am sure you can come up with better solutions, please let me know if you do!
This robot is actually the first robot I wanted to build, but I failed miserably. you can check this out and this. After building a working Arduino Hexapod robot, I feel confident that I can pull it off this time! I recycled the parts from the arduino hexapod robot, and build a body with styrene sheets, so there is no new parts.
For Inverse Kinematics, Check out my tutorial:
http://blog.oscarliang.net/inverse-kinematics-and-trigonometry-basics/
I made an excel spreadsheet to simulate the movements of a quadruped robot. It shows detailed inverse kinematics calculations, and it might help those who are having problem understanding IK to visualize the complex computations, also it’s a great help to debug your code.
Download Quadruped Robot Simulation Spreadsheet V1.0
Hardware that I use at the moment:
1. Arduino Mega
2. 12 Servos
3. Wii Nunchuck controller
5. a few thick styrene sheets (skeleton)
6. 6V Ni-MH 4300mh Battery
Plan:
============================================================
Project Started – Update 31/03/2013
Basically copied most of the codes from my last Hexapod robot. All I did was to remove the variables related to the middle legs, and modifed the preset variable values to work in the Quadruped Robot, and it actually worked!
But the movements are quite Awkward, a lot of work need to be done about Inverse Kinamatics.
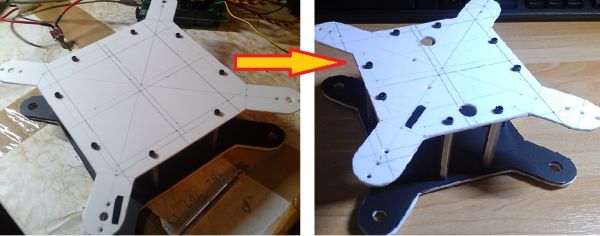
Here is how I made the body:
2. 12 Servos
3. Wii Nunchuck controller
For more detail: Arduino Quadruped Robot Stalker