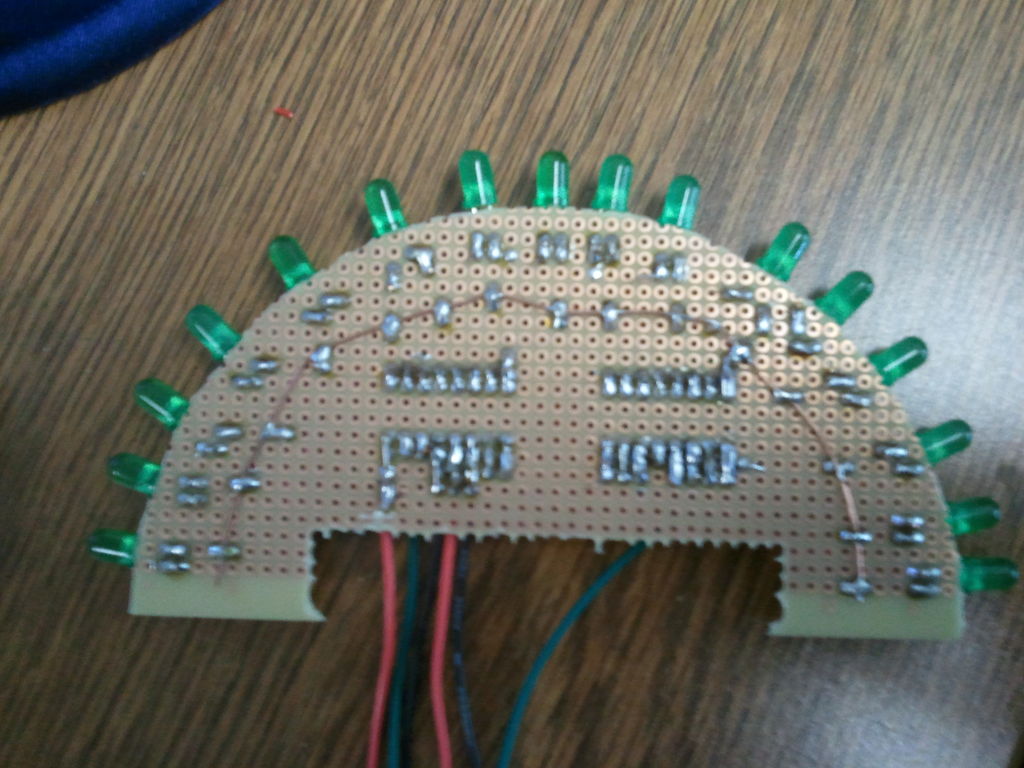
I started off with rectangular 2200 hole PCB’s from RadioShack and using cutting dykes I made half circle boards with a cutout in the center to to fit the processing module, lipo battery & charger. Each slice is comprised of 2 – 8-bit shift registers, 16 LED’s & 16 resistors. There are 8 slices in total so there are 128 LED’s, I use and Arduino nano 3.1 from makershed.com along with a lipo batter & charger available at sparkfun.com. In order to fit these slices together to form a sphere I used circular PCB’s that I found at radioshack. I used a dremel to cut slits every 45-degrees for each of the slices to slide into, the package comes with 3 sizes & 2 of each, I used the middle size. I added a parallax mesmic 2125 accelerometer to the main board in the center to provide orientation to the sphere. You charge the LiPo batter through a USB mini port located in the center, charging takes 1 Hour approximately and lasts for 45 minutes.

I wanted to thank Nikolai for the inspiration & Null Space Labs HackerSpace for their take on the project. I also wrote Charlie over there to get his input on the spiral animation & he was very nice & helpful. I am going to post all of the code that I used in case anyone is interested. I wouldn’t say that I am the most proficient programmer & am still learning so be kind.
Code:
int clockPin = 13; //IC Pin 11, Yellow Jumper
int dataPin = 11; //IC Pin 14, Blue Jumper
int latchPin = 8; //IC Pin 12, Green Jumper
const int xPin = 2; // X output of the accelerometer
const int yPin = 3; // Y output of the accelerometer
word patterns[176] = {
0b1100000000000000,
0b0110000000000000,
0b0011000000000000,
0b0001100000000000,
0b0000110000000000,
0b0000011000000000,
0b0000001100000000,
0b0000000110000000,
0b0000000011000000,
0b0000000001100000,
0b0000000000110000,
0b0000000000011000,
0b0000000000001100,
0b0000000000000110,
0b0000000000000011,
0b0000000000000001,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b1010111010001101,
0b0110101010011010,
0b0101010010011100,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b1010111010001101,
0b0110101010011010,
0b0101010010011100,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
0b0000000000000000,
For more detail: Arduino BlinkyBall Project