Summary of 6WD Shock Absorption Robot for Arduino
This article details the design and assembly of a 6WD mobile robot platform featuring aluminum alloy construction, high-speed DC motors, and a robust shock absorption system. It outlines a seven-step assembly process for mounting brackets, motors, wheels, and electronics. The platform supports various controllers like Arduino or Raspberry Pi and can be expanded with sensors, robotic arms, or video transmission modules.
Parts used in the 6WD Shock Absorption Robot:
- 2mm Aluminum Alloy Chassis
- Aluminum spray surface treatment
- 6 JGA25-370 High Speed DC Motors (17000 rpm)
- 1:34 Full Metal Gearbox
- 6 Damping Shock Absorbers
- U-type Brackets
- M3x8mm Screws
- M3 Nuts
- M3x10mm Screws
- M3 Locknuts
- Flange Bearings
- Couplings
- M3x6mm Screws
- M3x30mm Copper Pillars
- M2.5x16mm Screws
- M2.5 Locknuts
- M2.5x14mm Screws
- Switch
- PS2 Controller
- Video Transmission Module
- Li-Po Battery
- MD04 Motor Drivers (2 units)
- Arduino UNO R3 (or Mega 2560/Raspberry Pi)
- Servo Controller

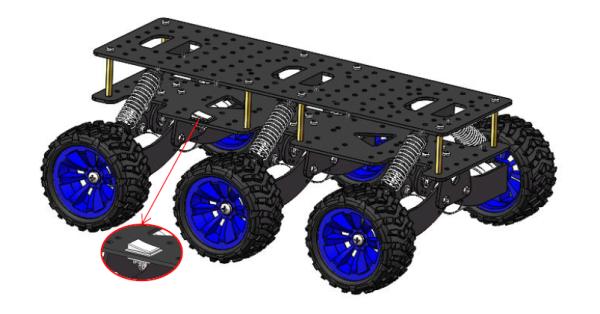
The new design of the 6WD mobile platform, the vehicle uses 2mm aluminum alloy, aluminum spray surface treatment. 6 high-speed DC motor (original 17000 rpm), with 1:34 full metal gear box, so that the car to obtain strong off-road performance.
Shock absorption design is the highlight of the car, the use of 6 damping shock absorber fixedly connected to the body to the car, so that the platform for better roadability, especially for some complex bumpy road.
6WD mobile platforms can be installed with different types of control boards or controllers such as Arduino or Raspberry Pi. The upper chassis uses a 3mm mounting hole, horizontal 12mm, vertical 14mm pitch can be a wide range of mounting a wide range of sensors, or additional expansion of other functions, such as the installation of a robot. The upper floor reserved Arduino platform, raspberry pie platform installation holes.
Step 1: U-type Bracket Assembled Down Platform
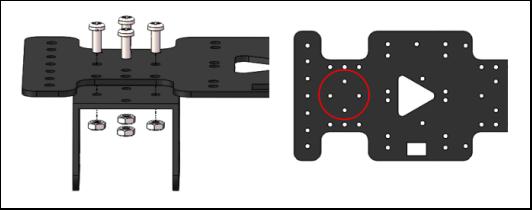
Chassis with double design, U-type bracket mounted on the chassis. Only need to install three, the opening direction to both sides.
Install the remaining 2 brackets in this way, with the retaining hole in the circle position
- M3x8mm screw X 12
- M3 nuts X 12
Step 2: Install U-bracket and Motor Bracket
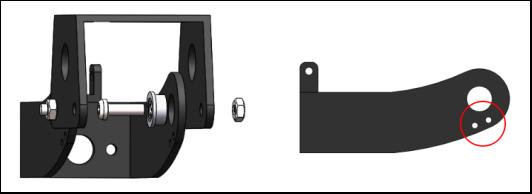
If you want to install the tension spring, install the red circle hole in the picture on the right, and then load the U-shaped bracket, first install the tension spring to re-install the bracket; the bearing is installed inside the bracket, the screw is located in the nut.
Screws, nuts and bearings for a single amount, a total of 3 groups.
- M3x10mm screw X 4 (12)
- M3 locknut X 4 (12)
- Flange bearing X 4 (12)
Step 3: Install Six DC Motor
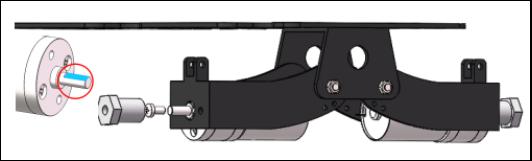
The motor has a threaded hole in the bracket mounting hole, fixed with screws, please good welding motor line before the installation, the middle short, 2 side long
Couplings installed on the motor shaft, the screws are fixed on the side of the platform, the red circle in the color of the side
- JGA25-370 high speed motor X 6
- Coupling X 6
- M3x6mm screw X 4 (12)
Step 4: Install the Copper Column to the Lower Chassis
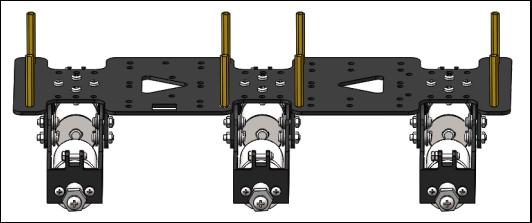
Before installing the motor, you need to weld the positive and negative poles of the motor to facilitate the wiring.
- M3x30mm copper pillars X 8
- M3x 6mm screw X 8
Step 5: Shock Absorbers on the Assembly to the Chassis and Up and Down the Chassis Together
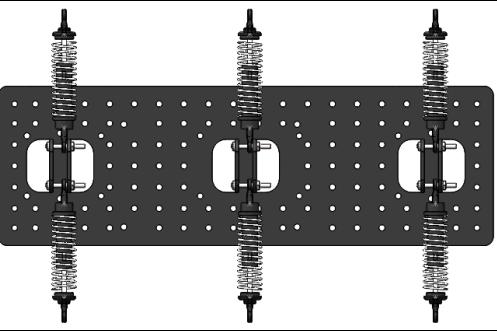
- Shock absorber X 6
- M2.5x16mm screw X 6
- M2.5 locknut X 6
Fixed the chassis on the copper column,shock fixed onto the motor bracket
- M2.5x14mm screw X 6
- M2.5 locknut X 6
- M3x6mm screw X 8
Step 6: Install the Wheels and Switch to Complete the Installation
- Switch X 1
- M3x6mm screw X 8
Step 7: Hardware Parts
I added a PS2 and a robot to the 6WD robot, but I did not do a good job of using robots to do some things for me because I still lacked eyes. I’ve already purchased the video transmission module and connected it directly to the phone. I now use my PS2 handle to control my 6WD robot to move it back and forth. Of course, it is just a mobile platform, you can add some other sensors to help you achieve some of the features.
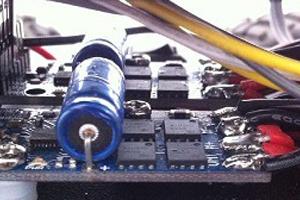
Because use high speed motor, so we also need large current drives and Li – Po, choose the limit current 23 a motor driver, this module need two, we will be one sided motor received M + positive, negative answer M – (group 3 motor), so convenient we control our robot.
The main control board chooses Arduino UNO R3, and if you need more interfaces, you can use Mega 2560 or Raspberry Pi.
If you want to control the robotic arm, you can use the steering gear controller to control it through the UNO serial port;Of course you need a 6v power supply for your steering gear.You can add the robotic arm program to the PS2 and control with the handle to grab what you want.
MD04:
- Working voltage: 5.9-30V
- Working current: 23A
- Logical input: 1.8v, 3.3v, 5V (Max)
- PWM frequency: 100kHz
- SLP: HIGH (+5V) Use time to pull up
- PWM: Control of motor speed
- DIR: Control the direction
- GND: GND
- GND:GND
- M-: Motor
- M+: Motor
- VM: 6-12V (2s or 3s) Select the voltage according to the motor, up to 12V.
PS2:
GND – GND; VCC – 5V; DAT – A0; CMD – A1; CS – A2; CLK – A3
Source: 6WD Shock Absorption Robot for Arduino
- What materials are used for the vehicle chassis?
The vehicle uses 2mm aluminum alloy with aluminum spray surface treatment. - How does the shock absorption design improve roadability?
It uses six damping shock absorbers fixedly connected to the body to handle complex bumpy roads. - Which control boards can be installed on the upper chassis?
You can install control boards such as Arduino or Raspberry Pi. - What is the pitch for mounting sensors on the upper chassis?
The horizontal pitch is 12mm and the vertical pitch is 14mm. - How many motor drivers are required for the high-speed motors?
Two MD04 motor drivers are needed because of the large current requirements. - Can this platform control a robotic arm?
Yes, you can use a servo controller connected to the UNO serial port to control a robotic arm. - What power supply is needed for the steering gears?
A 6v power supply is required for the steering gears. - How is the PS2 controller connected to the main board?
GND connects to GND, VCC to 5V, DAT to A0, CMD to A1, CS to A2, and CLK to A3.