This project answers to a need I had: a third hand that holds a camera while I perform a test and takes photos/videos (useful when you’re stuck at the lab late at night, and suddenly need a photographer).
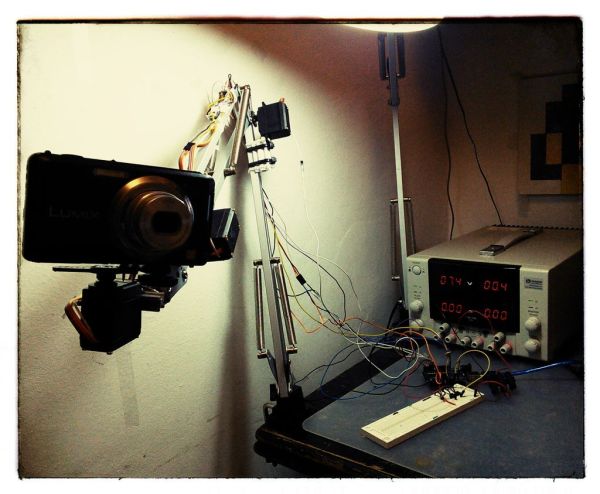
The downside to a robotic arm was obvious – It needs to be programmed, and it is the last thing you want to do when you need to make a video. So I made it motion capturing device as well…
Motion capturing and playing device – you “teach” the arm what it should do, and it repeats the movement! (no programming or computer needed).
For long time I wanted to transform standard IKEA Tertial lamp (here) into a functional robotic hand, I wanted to make it easy, without any manufactured parts, and to control as many degrees of freedom (DOF) as possible.
After modeling the lamp using my favorite CAD software, I realized the standard servos, placed in the right places can (to some extent) work.
Step 1: Stripping and modeling IKEA Tertial lamp

First step is, of course, to get a Tertial lamp, should be quite easy to get here, and remove the power cord (must be cut), dismantle the lampshade (But leave it’s connector !) and remove the springs for future use.
Step 2: Hacking servos for analog feedback
In purpose to get feedback from the servos, they should be capable to give feedback (analog), ready made analog servos can be found at Adafruit, or can be manually made as described here:
( I used cheap MG995 ), after some ruined servos I managed to figure the right steps:
- Pick the servo…
- USE TAPE (see image) to hold the top (the side near the power output) otherwise the transmission might fall apart
- Remove 4 cross bolts from the bottom.
- Take the PCB out gently, and position in your soldering stand
- Solder wire to the middle connection of the servo’s potentiometer
- Assemble all back to have an “Analog feedback” servo.
repeat 3 times for all servos needed for the project.
Step 3: Camera adapter
Connection of the camera to the arm should be easy release and enable full rotation,
Camera to servo steps:
- Pick one servo.
- Pick some nuts and arms (that come with the servo)
- Get a nut to mount the camera (any 3/8″ nut will do).
- Build an arm that fit your camera,
- You’re done !
Now, you need to connect the servo to the arm tip:
- Pick the arm tip part
- Bend the little metal plate to straight line.
- Take any small block/profile and mount to the metal plate.
- Mount the servo to the same block/profile
- You’re done !
Step 4: Connecting motors to the arm
The arm should be actuated with two servos (the third is used for the camera – see previous step)
Servo 2 (arm end) mounting steps:
- Dismantle the triangular plate from the arm tip.
- Drill few holes to enable mounting of the servo arm to the plate.
- Mount the servo arm to the plate
- Assemble the plate back to the arm
- REPLACE THE UPPER BOLT, with a bolt the goes directly into the servo center of rotation. (see images)
- Tighten the servo body to the bar (I used spacers and zip ties – improvise!
Servo 3 (middle) mounting steps:
- Dismantle the trapeze plate from the arm.
- Drill few holes to enable mounting of the servo arm to the plate.
- Mount the servo arm to the plate
- Assemble the plate back to the arm
- REPLACE THE UPPER BOLT, with a bolt the goes directly into the servo center of rotation. (see images)
- Tighten the servo body to the bar (I used spacers and zip ties – i
For more detail: Robot arm from a desk lamp (IKEA Tertial hack)