I know, I know, this one has such a simple name. Where’s the pun? Honestly, the description was just to long to include one. Maybe it could have been “What’s Up? Sensing Orientation With The ADXL335 + Arduino” – Ehhh… Probably not.
A few weeks ago we wrote a tutorial about using the ADXL345 to sense taps, and drops, but this week we are going to wind it back, go back to basics, and show you how to take an analog 3-axis accelerometer and use it to sense simple orientation with it, specifically the ADXL335, but this can be applied to any analog 3-axis accelerometer.
Before we really dive into it, we need a general understanding of how accelerometers work, so if you already know why each axis can only differentiate 180deg of movement, you can skip this. Wraning: Over-simplification ahead. In the last article I described an accelerometer as a device that sensed movement. Today, think of them as devices that sense gravity.
Basic Understanding Of Accelerometers
Accelerometers measure acceleration, often caused by motion. But when they are standing still, the only acceleration the accelerometer senses is due to gravity pulling down on it.
Imagine a box that has little springs sticking straight out from the sides of the box, and that the accelerometer measures how hard gravity is stretching out those springs. The springs on the side are all bending the same amount, the spring on the bottom is all stretched out, and the one at the top is not stretched at all (because the spring is pull back into itself), so the accelerometer sees it as feeling no gravity, or 0g (gravity). If you rotate the box 90º and follow the spring on the top. It is now on the side and is hanging down some and the sensor sees it now feels .5g. Rotate 90º again, and it is at the bottom, stretched out, and it feels 1g. Rotate again 90º and we are at the side again, with it feeling .5g, and 90º rotation again, we are back at the top and it feels 0g. So we made a full rotation and the accelerometer saw this: 0g-> .5g -> 1g -> .5g -> 0g.
If you look at this, it means that the accelerometer can really only sense differences in 180º of movement as the other 180deg is just a mirror image. So how can we sense 360 deg of movement?
The trick to this is that while one axis can only sense a 180deg difference, so can the another axis, but they sense it differently. If you look at the chart to the right, you can see the sensed values while rotating round the X Axis. (The x never changes because it is always facing the same direction) – So we can combine the y, and z values to find x using a trigonometry function called Atan2 who then gives us values back as -180º to 180º (but in radians, so it is -π to π and well have to convent it).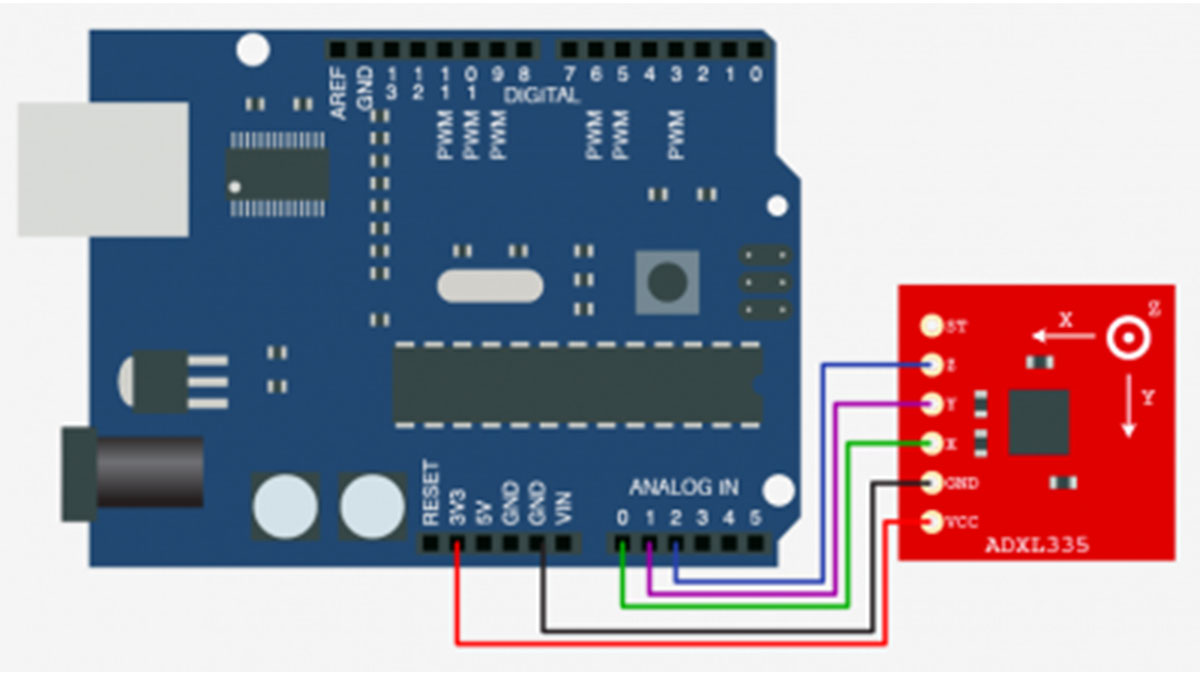
No Love For Yaw
Yaw is name for rotation around an axis that is similar to spinning a top, or shaking your head “no.” Accelerometers can’t measure this type of motion. Why? Well think about the box. If you turn the box in this manner, non of the sides change their orientation to the ground. If you need to measure yaw, you will need to incorporate a gyro or digital compass into your project, but it gets tricky, and is beyond the scope of this article.
For more detail: Sensing Orientation With The ADXL335 + Arduino