The goal of the project is to come up with an affordable yet generic vibrotactile feedback device to be used for educational purposes. A chemistry learning environment is developed to demonstrate a specific application of our device, in which users can manipulate ions and feel the corresponding electromagnetic attraction and repulsion forces through the vibration feedback. The entire project went well and people who used our device agreed on its fun yet educational purpose.
Introduction
Many educational haptic feedback devices use kinesthetic force feedback devices such as the Novint Falcon and the Phantom Omni. Although these devices are relatively cheap compared to other high end haptic feedback devices, they are still expensive for educational purposes. Our team has therefore decided to develop an affordable vibrotactile haptic device that can be used as an education tool for augmenting teaching of various disciplines through the use of haptics. The device must be generic enough such that it can be used in many different educational situations.
Our team’s intention to use vibrotactile feedback is motivated by the fact that vibrotactile feedback devices had been used in real-world applications such as medical catheter teleoperator, gaming controller, and mobile phones with considerable success. In addition, vibrotactile feedback devices are generally less complex and cheaper compared to kinesthetic feedback devices, which makes it suitable for use in the education field.
Background
Many haptics applications have been designed for teaching scientific concepts in the educational field. For example, [1] and [2] use the Phantom Omni haptic device together with detailed molecular simulation in order to convey chemical bonding information to the user. Similarly, [3] has used the Novint Falcon to allow user to the feel the molecules and their atomic interaction forces. [4] has used haptics to teach mathematical functions to people with vision disabilities, by allowing them to feel the curve and shape of the mathematical functions.
Many of the above educational haptics applications rely on commercial products such as the Novint Falcon and the Phantom Omni, Though this product are cheap compared to other high end haptic devices, they still cost from $300 for the Novint Falcon and $1000 for the Phantom Omni. Given that schools typically requires tens or more haptic devices, such high cost will prevent them from investing in using haptics as a tool for their education work.
Vibrotactile haptic feedback devices has been used in many industries with varying degrees of success. Vibration feedback has long been used in pagers and cell phones to inform user of impending phone calls, messages, or emails. In the gaming sector, vibration feedback has been used to add realism to the gaming experience [5], in which gamers feel vibrations whenever they are being attacked or when they bumped into a wall. Recently, vibration feedback had been used in medical catheter teleoperation systems to convey obstacle information to the surgeon. Given such rich uses of vibrotactile feedback in many other fields, it is a wonder why vibrotactile haptic feedback devices has not been more pervasive in the education field. Our literature study informs us that there are very few devices that uses vibration feedback for use in education or teaching. This therefore motivates us to come up with a cheap yet generic vibrotactile feedback device for use in educational settings.
Methods
For our overall design, our team has decided to come up with a vibration feedback device that is self contained, i.e., no external power input or wiring cable needs to be attached to the device. This is to allow complete freedom of motion when using our device. In order to realize this objective, the device will be battery powered, and that wireless communication will be used to communicate between the device and an external computer.
Mechanical design
Fig. 2: Silicone rubber pads used for isolating the vibration of the motor from the rest of the haptic sphere structure
Our team has decided to come up with a spherical shaped haptic device with finger indentations. This design allows us to standardize the manner in which user will handle the haptic device. In addition, vibration feedback can be provided to the user’s individual fingers through the finger indentations. By placing the vibration feedback under the user’s finger and isolating the vibration of the motor from the haptic sphere structure, user will be able to better discriminate the vibration between the different motors, which will allow complex patterning to be used in order to convey different information to the user. Such patterning will also expand the different type of information that can be conveyed to the user using limited number of vibration motors. With regards to the number of vibration motors, our team has decided to provide feedback to the index, middle, and ring finger, resulting in 3 vibration motors. The thumb and the baby finger are mainly used for providing a firm grip of the device and therefore we decided not to provide any vibration feedback information to these fingers.
To isolate the vibration of each individual vibration motor, our team has decided to mount the vibration motor onto a silicone gel pad before inserting them into the spherical structure. The silicone gel, due to its rubbery nature, damped out most of the vibration and therefore decreases the amount of vibration felt on the haptic sphere structure.
In addition, holes are cut out from within the haptic sphere in order to contain the electronics. The main components of the electronics are the Arduino Uno board, the 2-inch square PCB board, and the battery pack.
Electrical design
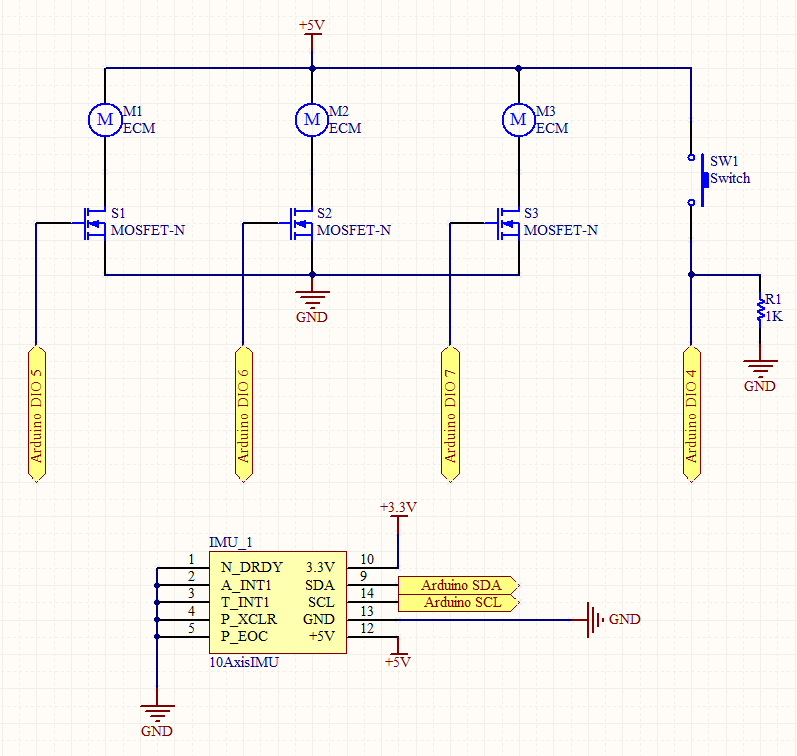
For our electrical design, we uses the arduino microcontroller to control the vibration motors as well as to sense input from the Inertial Measurement Unit (IMU), which contains a 3-axis accelerometer, a 3-axis gyroscopes, and a 3-axis magnetometer. The IMU allow us to sense the orientation of the device. MOSFETs are used to enable the microcontroller to switch on/off the vibration motor. An input switch is also incorporated in our design to allow user input. The bill of material for our electronics is shown in the table below:
| Item | Number of item |
|---|---|
| 2N7000 N-channel MOSFET | 6 |
| Pager Motor | 6 |
| 9 axis IMU (ADXL 335, HMC5883L, LG34200D) | 2 |
| Arduino UNO board | 3 |
| XBee Wireless Module | 2 |
| 9V battery holder | 2 |
| Momentary switch | 2 |
A diagram of our electronic circuit is shown as follows:
Fig. 3: Electronics circuit schematic for the haptic sphere
Arduino code and Computer serial interface
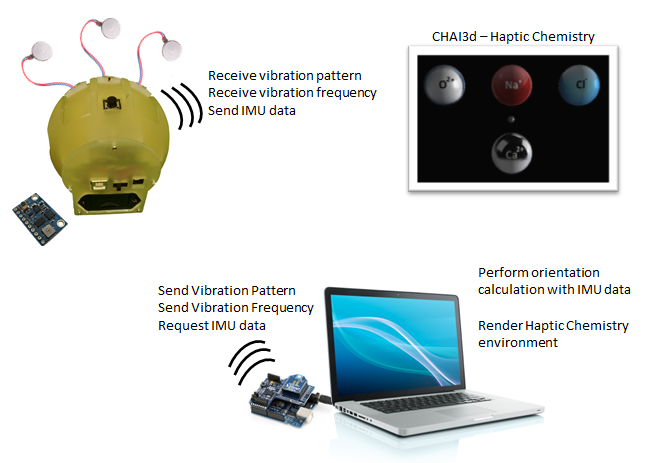
For our device, the Arduino microcontroller acts as a communication medium between the computer and the IMU / vibration motors. The Arduino microcontroller is coded with instructions on the motor vibration pattern and frequencies when specific signals is received from the computer through the serial interface. In addition, the accelerometer, gyroscope, and magnetometer data are also read through the Arduino microcontroller and send to the computer through the serial interface. Such architecture allow us to minimize any calculations done on the microcontroller, as well as to perform complex calculations or render complex virtual environment using the computer.
For more detail: Intuitive Vibrotactile Feedback Educational Feedback Devices