Project by Ailey Simpson and Peter Ehvert
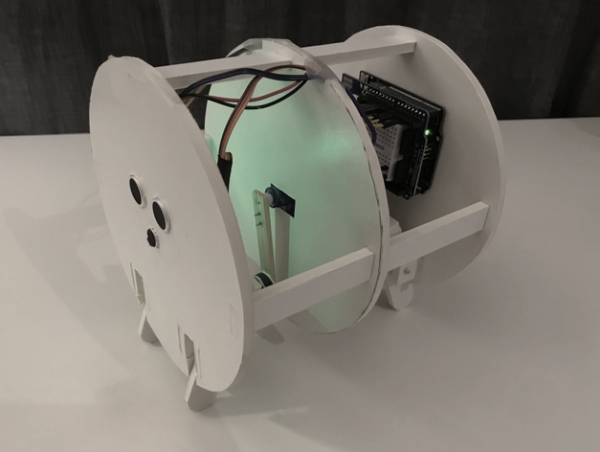
Rooted in biomimetics, this project for Computational Design and Digital Fabrication looks to emulate one of the most useless behaviours seen in the natural world, the Fainting Goat. The robot shown here copies some of the core principals of the fainting goat but also includes some additional twists.
In this instructable, we will go through how to build the circuit and the mechanics for this useless machine.
Step 1: Materials List
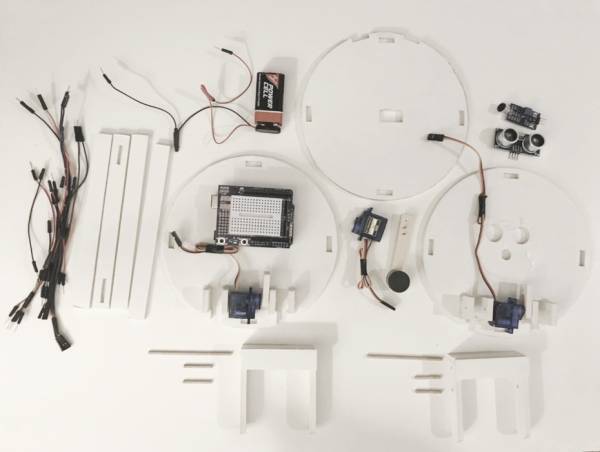
Electronics:
Arduino Uno R3 Controller Boar
Motors:
Sensors:
Power Source:
Body:
Step 2: Schematic Circuit
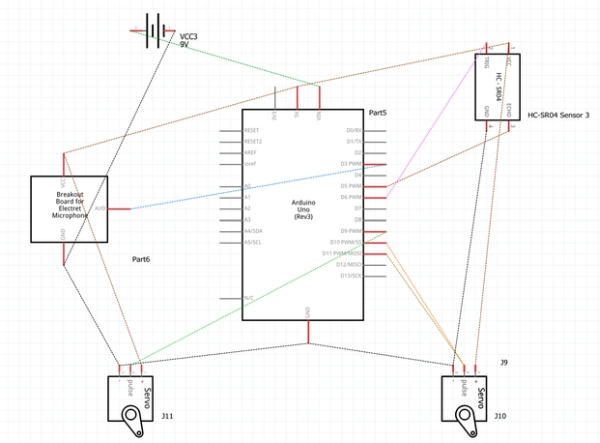
Here is the circuit used for this useless machine. Double check your wiring before turning it on!
Step 3: Assembly 01: Leg Plate
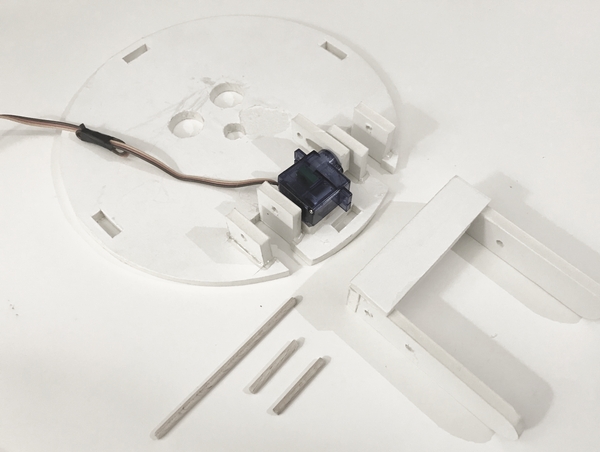
Here is the assembly for the leg portion of the fainting goat. These legs go up when the goat faints and go back down when the goat is ready to wake back up.
Step 4: Assembly 02: Weight Plate
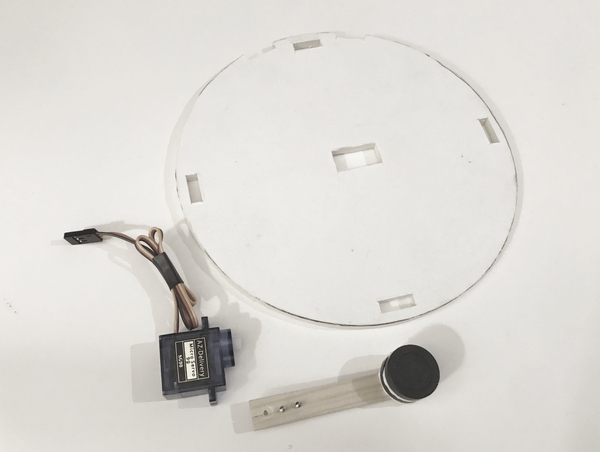
The second assembly step is to assemble the weight plate. This plate helps the goat fall off balance (faint), roll around and stand back up.
Step 5: Assembly 03: Sensor Plate
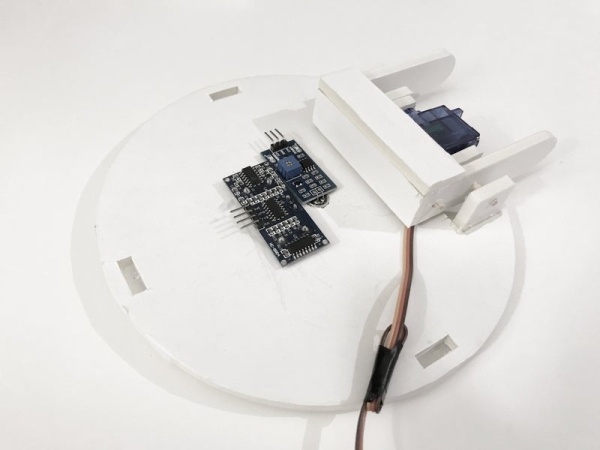
The final plate to assemble is the sensor plate. The microphone and ultrasonic sensors will tell the servos what to do and when to do it.
Step 6: Assembly 04: Assemble Plates
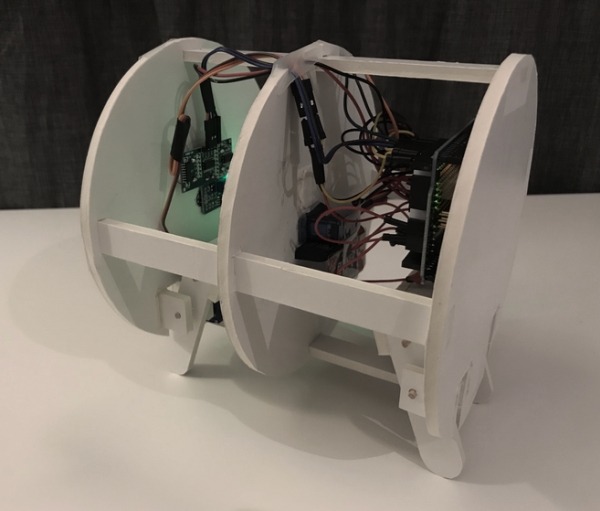
Once the two leg plates and the weight plate have been assembled, it is time to connect them together. Make sure the circuit is connected properly.\
Step 7: Code Implementation
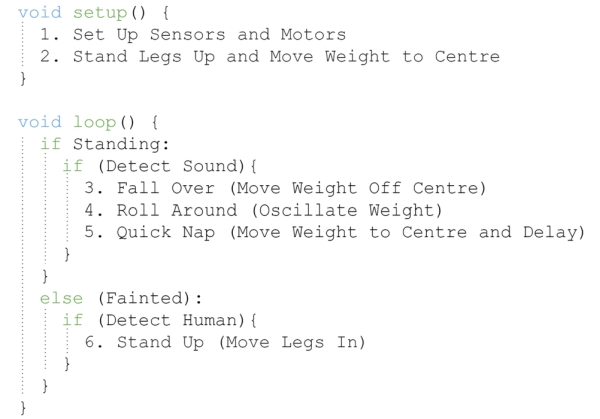
In the final step, load the code into the Arduino IDE, and then into the Arduino itself. This code is a series of kinematics powered by the servos, induced by the ultrasonic and microphone sensors. In this pseudo code, you will see that if the goat detects a sound, it will faint and roll around. The goat will only stand back up once it senses that it is safe with a human nearby. After you run the code, you will have completed the most useless machine, the Fainting Goat!
Source: Fainting Goats Are Friends Not Food