The project goals are:
-
- Adjustable number of detents
Adjustable foce threshold
Software controlled damping
Implementation:
A brief overview:
The team’s design utilizes several components:
Arduino Leonardo
Firgelli L16-50-35-12-P actuators (2x)
FSRs (4x)
TI L293D H bridge
MSU Eagle custom PCB print
 The Arduino microcontroller is the heart of the team’s project. This microcontroller allows for software control over the joystick. The Arduino has it’s own IDE for programming which allows for USB plug-and-play, mouse movement, and keyboard libraries straight out of the box! It is perfect for the joystick since it has the required 7 digital pins and 6 analogue pins.
The Arduino microcontroller is the heart of the team’s project. This microcontroller allows for software control over the joystick. The Arduino has it’s own IDE for programming which allows for USB plug-and-play, mouse movement, and keyboard libraries straight out of the box! It is perfect for the joystick since it has the required 7 digital pins and 6 analogue pins.
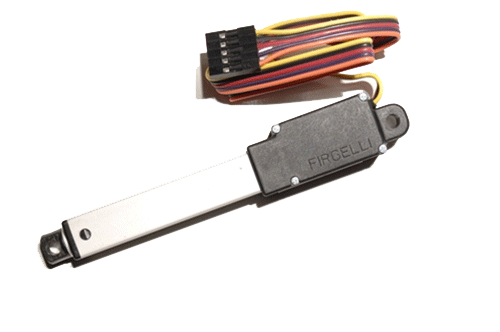 These actuators support the positioning the joystick. As the user pushes the joystick, the actuators will either lengthen or shorten, but what’s special about these is that they have potentiometer position referencing. This allows for equal positon based denting!
These actuators support the positioning the joystick. As the user pushes the joystick, the actuators will either lengthen or shorten, but what’s special about these is that they have potentiometer position referencing. This allows for equal positon based denting!
FSRs (Force Sensing Resistors) register force as pressure is placed on the pads. This value can be read through the analogue inputs of the Arduino.
The TI L293D allows the Arduino to drive the actuators in both forward and reverse directions. Using the h bridge is essential since the joystick will be able to talk quickly and reliably to the actuators. Here is the circuit schematic used to make this happen.
For More Detail: Dented Joystick