Summary of Arduino Hardware PWM for stepper motor drives
This article explains using Arduino hardware PWM via the TimerOne library to control stepper motors for laser cutter projects like JustAddSharks. It contrasts software-generated signals with stable hardware modules, detailing how frequency and duty cycle adjustments drive servos versus steppers. The author notes this open-loop method works for Z-axis end-stop limiting but lacks step counting, requiring external feedback for precise tracing tasks.
Parts used in the JustAddSharks project:
- Arduino Pro Mini
- Stepper motor
- Stepper motor driver
- Z axis assembly
- End switches
- TimerOne library
There are a lot of tutorials online detailing the hardware PWM features of the arduino and how it relates to servo motor control. This instructable will show you how to use the hardware PWM to control a stepper motor instead. We’ll start with the basics of PWM, show briefly how it relates to servo motors and then show the differences for use with stepper motors.

Step 1: Pulse Width Modulation
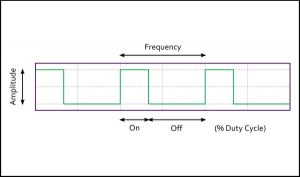
- Amplitude – The amount the signal changes between On and Off states
- Frequency – The number of times the signal repeats in a given time frame
- Duty Cycle – The proportion of On time to Off time usually expressed as a percentage
In these digital systems the amplitude is fixed between 0 and 1, between 0V and VCC. In my testing this was +5V.
In it’s simplest form a PWM square wave can be created with a few lines of code. The following code would produce a signal with a 1 second Frequency and a 10% duty cycle. This would be functional but the Arduino would be dedicated to producing this signal the whole time and would not do anything else. This is why the blink without delay example is so important to learn.
digitalWrite(IOPin, HIGH);
delayMicroseconds(100);
digitalWrite(IOPin, LOW);
delayMicroseconds(900);
With a software generated signal any variation in the code execution time can cause variations in the output. Conditional statements may not execute on every loop so it is hard to guarantee that each loop will take exactly the same amount of time. Modern microcontrollers have dedicated hardware modules to generate a code independent square wave. Values for Duty cycle and Frequency are written to registers within the controller and the hardware generates the appropriate signal on the desired output pin.
The registers for the Hardware PWM module can be written to directly as described here, but the joy of the Arduino environment is that somebody is likely to have written a library to simplify that process. The TimerOne library provides control over the HardwarePWM module connected to timer 1 (aptly). This library has easy functions for setting the frequency and duty cycle of the square wave being generated
- pwm(pin, duty, period) – Generates a PWM waveform on the specified pin.
The minimum freqeuncy supported by the library is 1ms and the maximum is 8.3s. The duty is specified as a 10 bit value, between 0 and 1023, and this correlates to the 0% and 100% values respectively.
Step 2: PWM for servo control
For servo control the Frequency of the signal is fixed, and the duty cycle varies.
Servos accept a common control signal, a square wave with a repeat frequency of 20ms and an on period of 1ms (5%) to 2ms (10%). It is the width of the on pulse that indicates what angle the servo should be at.
Here is the code to set up the two extreme signals using the Timer one libraries
- pwm(9, 51, 20000);
- pwm(9, 102, 20000);
You’ll note that using this method there are only 50 steps between the minimum angle and the maximum angle, this is sufficient resolution for most basic systems. There are better methods for controlling the servo to provide more accurate resolutions but they are beyond the scope of this instructable.
Step 3: PWM for stepper motors

For stepper motor driver control the duty cycle can be fixed and the Frequency varied.
The stepper motor driver expects a series of input pulses to move the motor to any given angle. The driver moves the motor one step for each input pulse. The direction of the motor is set by the second input.
Here is the code to set up the two different speeds using the Timer one libraries
- pwm(9, 512, 20000);
- pwm(9, 512, 40000);
A smaller value for the period produces a higher frequency which gives more pulses per second and makes the motor turn faster. Changing the period while the motor is running can produce acceleration in the motor which will help the stepper reach it’s maximum top speed.
Step 4: Putting It Into a Project
I discovered all this information with a goal in mind. I wanted to drive the stepper motor connected to the Z axis of my laser cutter. Manually generating a software PWM signal on an Arduino pro mini just wasn’t making the axis move fast enough and the occasional jitter in code had a habit of making the motor stall. I needed this clean output signal to drive the motor faster and more reliably, the results were pretty promising.
I have another project in development that will use this same control method, in that system the user will provide the feedback and will stop the motor when it is in the correct position. This method is not really suitable for controlling the laser cutter as it traces out a design so I will move on to look at the next thing, expect more ibles in the future.
- How can I control a stepper motor instead of a servo?
You can use hardware PWM to vary the frequency while keeping the duty cycle fixed, unlike servo control where frequency is fixed and duty cycle varies. - Why should I use hardware PWM over software generated signals?
Hardware PWM generates code-independent square waves that prevent jitter and stalling caused by variations in code execution time. - What library simplifies controlling the Hardware PWM module on an Arduino?
The TimerOne library provides easy functions to set frequency and duty cycle without writing directly to registers. - Can I change the motor speed while it is running?
Yes, changing the period value while the motor runs produces acceleration and helps the stepper reach its maximum top speed. - Does this method count the steps taken by the motor?
No, this method does not count steps; it relies on another feedback mechanism like end switches to determine position. - Is this control method suitable for tracing laser designs?
No, it is not suitable for tracing because it uses open loop control without step counting required for accurate design paths. - What are the minimum and maximum frequencies supported by the TimerOne library?
The library supports a minimum frequency of 1ms and a maximum of 8.3s. - How do I specify the duty cycle in the TimerOne library?
The duty is specified as a 10-bit value between 0 and 1023, correlating to 0% and 100% respectively.