Wex detects your location with ultrasonic sensors then follows you with his one flashing eye. His red “heartbeat” can be seen through his mouth.
Step 1:
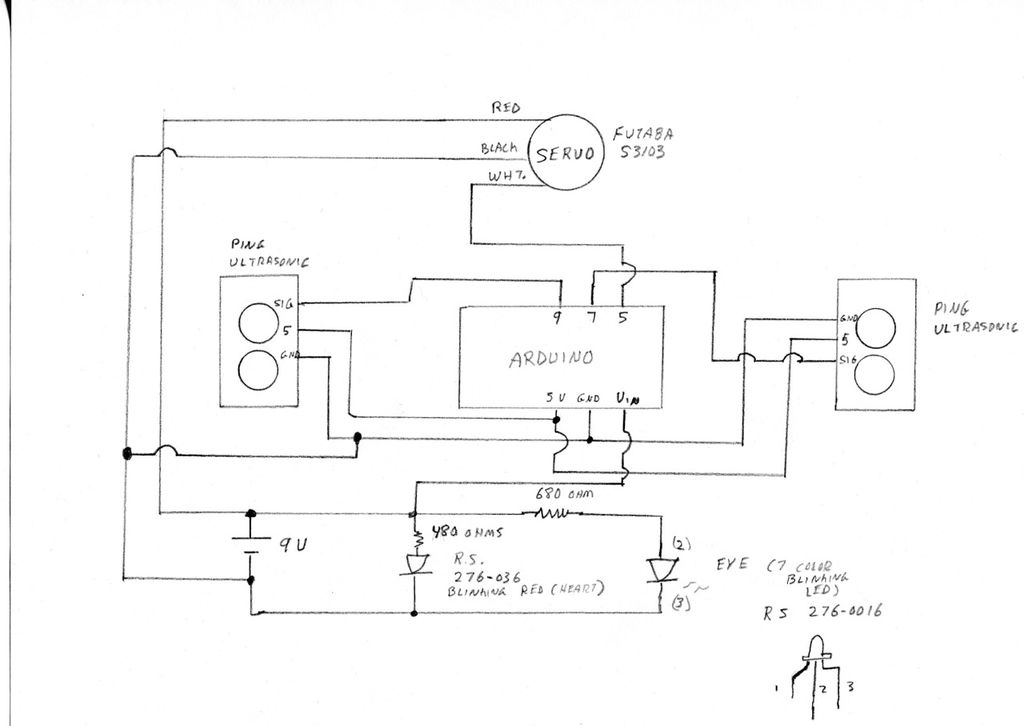
Parts needed include:
Arduino
Two ping ultrasonic sensors
Futaba s3103 servo
Radio Shack 276-0016 7 color led
Radio Shack 276-036 flashing red led
9 volt battery
480 ohm resistor
680 ohm resistor
Metal duct tape
Super glue
Case (print 3d parts–use a printing service to print them–make your own case)
http://www.thingiverse.com/thing:32121
The software “looks to the left–turn left if something there”
“look to the right–turn right if something there”
“look straight if nothing to the left or right”
#include <Servo.h>
Servo myservo;
const int pingPin = 7;
const int pingPin2 = 9;
long duration;
long duration1;
void setup ()
{myservo.attach(5);
}
void loop ()
{
pinMode (pingPin, OUTPUT);
digitalWrite (pingPin, LOW);
delayMicroseconds (2);
digitalWrite (pingPin, HIGH);
delayMicroseconds (5);
digitalWrite (pingPin, LOW);
pinMode (pingPin, INPUT);
duration = pulseIn (pingPin, HIGH);
if (duration <5000)
{
myservo.write(125);
delay(500);
}
// else
{
pinMode (pingPin2, OUTPUT);
digitalWrite (pingPin2, LOW);
delayMicroseconds (2);
digitalWrite (pingPin2, HIGH);
delayMicroseconds (5);
digitalWrite (pingPin2, LOW);
pinMode (pingPin2, INPUT);
duration1 = pulseIn (pingPin2, HIGH);
if (duration1 <5000)
{
myservo.write(5);
delay(500);
}
if (duration >5000 and duration1 >5000)
{myservo.write(65);
delay(500);
}}}
Step 2:
Print the case–expect shrinkage cracks.
Step 3:
Cut up plastic scraps into a can.
Step 4:
Add acetone (fingernail polish removal section of stores) and stir. Fill the cracks and let dry.
Step 5:
Fasten Ping sensors to the triangular ear pieces. Add wire wrap wire to the Ping pins. Super glue the ears to the case.
Two ping ultrasonic sensors
Futaba s3103 servo
Radio Shack 276-0016 7 color led
For more detail: Wex, the One Eyed Watcher using an Arduino