While displaying these robots, I observed that the thousands of people who interacted with them, projected their own social realities upon these devices which were little more than motors zip tied to plastic household utensils. The obvious shortcoming of the Simple Bots approach was that no matter what personalities people projected upon these creations, they ultimately implicitly understood that these creatures were robotic.
This led me to wonder what would happen if I built robots that were more intentionally organic-like and fluid in motion. Would people perceive them as being even more alive? Was there a threshold where people would stop perceiving them as robots and start perceiving them as living organisms? However, before I could answer these questions, I needed to figure out the mechanics that would allow these motions.
While I could have explored a number of different fabrication processes, I recently found myself with unlimited access to eight Objet Connex 500 3D printers. Aside from having an incredibly high print resolution, what makes these printers unique is their ability to print digital materials with a wide range of hardnesses and colors. These printers essentially allow the different materials to be mixed together to create a Pantone-like scale for material hardness. This was particularly compelling for this type of robotics because it would provide the ability to print highly accurate assemblies that simultaneously contained rigid and flexible materials. By printing materials with different hardness, flex, stretch, and torsion properties, I would be able to print life-like joints and musculature. With this in mind, I set out to make biologically inspired designs using 3D printing technologies.
All digital models were created using 123D Design on account of its ease of use, and ability to be downloaded and used for free. This is an intentional decision to make the project open, and modifiable. It is my hope that others will be able to download my files, iterate upon my solutions, and ultimately expand my research. All content contained herein is licensed with a Creative Commons 2.5 Share-Alike Non-Commercial Attribution license.
 Remove these ads by Signing Up
Remove these ads by Signing Up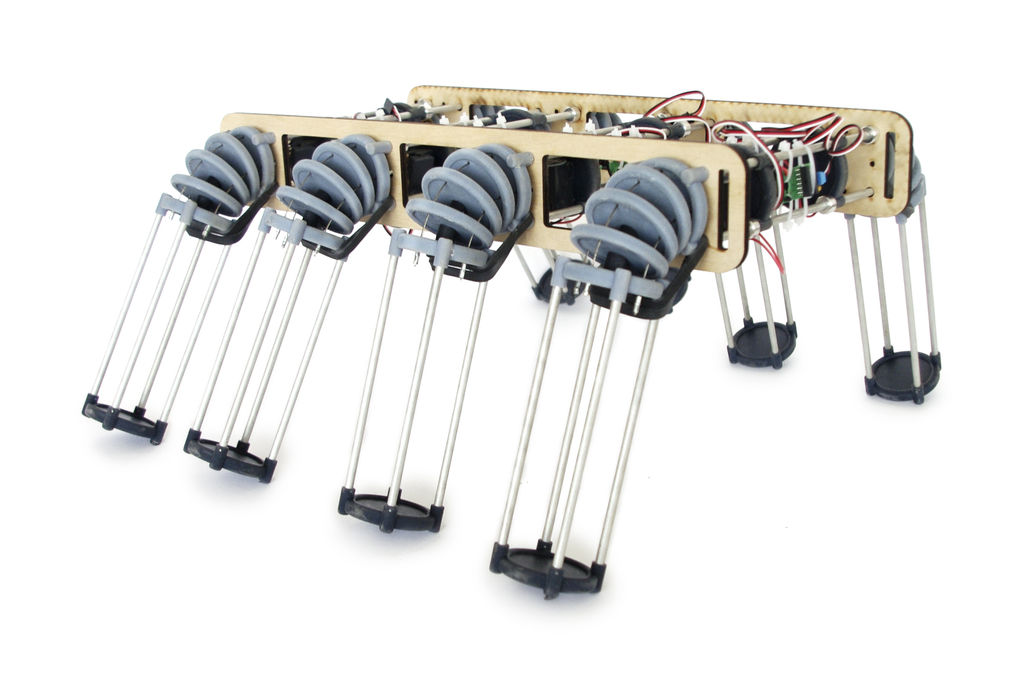
Step 1: A Note on Evolution
Most notably, Vogul points out:
- “nature is not only glacial in speed, but lacking in versatility”
- “most variations [mutations] are either neutral or detrimental”
- “innovation comes hard, and once achieve it disseminates entirely within a lineage”
- “diversity in nature represents superficial features of an exceedingly conservative and stereotyped character”
He then goes on to explain how for human innovation, design is a much better model because fundamental design change faces no evolutionary barriers. For instance, a design can be fundamentally changed without taking into consideration the need for each subsequent iteration to allow perfect functionality to perpetuate the continuity of its lineage. Nor do we have to account for growth or scaling of the object over its lifespan. Humans are only limited by the materials at hand, the existing knowledge base, and ingenuity. Humans are also free to borrow, adapt, and remix designs at will. Most challenges for human design innovation tend to be social and/or legal, not formalistic.
While it may be tempting to describe robotics in terms of evolution, I think it is better to view it as an iterative process. This process, while very similar to evolution, is noticeably different. As evolution repeatedly demonstrates, most change is detrimental, blind and slow. Iteration, on the other hand, is (ideally) beneficial, intentional, and fast. One rarely iterates if they don’t think the subsequent version is going to be an improvement or will illuminate something that will help to move other iterations forward. Just as organic-like machines are similar to life, but not replicating it; so is the case that the process for making these machines should be evolution-like, but not a perfect repetition.
Step 2: Research Methodology
In doing this, it is my goal to create robotic agents that can help us better understand the relationships between ourselves and our technology. While it may seem like I got lost in a web of formalistic considerations, please bear in mind that my ultimate goal is to make abstracted biologically-inspired robots intended to capitalize on our existing mental associations, and social relationships. I am not trying to explicitly further the field of engineering, nor am I trying to exclusively understand abstract social constructs. My goal is to find a holistic approach that acknowledges both, but does not favor either.
As Simon Penny points out in Bridging Two Cultures (2005):
Hopefully some of what I share here will help contribute to and push forward ‘more serious’ objectivist-positivist scientific inquiry. More importantly, I hope to provide people with tools and techniques which can be used a springboard for better understanding our relationships with technological organisms. This will ideally help us to have richer social experiences with technology, and live happier and fuller lives.
Step 3: The Uncanny Valley and Social Interaction
Additionally, beyond our own social constructs, we bring with us a nagging meta-cognition that this being is not alive in the same sense that we are. This understanding can both enable us to accept it more readily as an autonomous creature in its own right, but also lead us to reject it as a cheap simulation. As roboticist Masahiro Mori first claimed in 1970, an “uncanny valley” in human empathy levels exists at threshold in which a robot becomes very human-like, and then disappears entirely when perfect replication is achieved. In other words, we have empathy for robots until the point at which it is very close to being human, at which point we have a strong revulsion. Should the robot continue becoming more human-like (to the point of being indistinguishable from human), our empathy levels spike up to human-to-human empathy levels. This sudden and drastic dip where our empathy levels drop dramatically before spiking up again, is the “uncanny valley”
For example, this unsettling humanoid robot falls deep within the “uncanny valley:”
While this principle is largely applied to humanoid robots, I would venture to guess the same principle can be applied – to a large extent – to zoomorphic robots. After all, regardless of whether animals have rich cognitive and emotional lives (which I personally believe some do), we project ours upon them, and in some capacity humanize them. I would venture to guess a nearly perfect robotic dog, would be just as unsettling as a nearly perfect robotic human.
Understanding that I will never achieve entirely perfect zoomorphic replicas, I have decided not to set my sights on it. It is my worry that “almost perfect” execution might actually be worse than an abstracted mimesis. Instead of direct replication, I have set out to create what Simon Penny termed a “Social Agent.” These agents exist within a social environment, as a sort of reflection of the viewer. People observe them and then project their own cultural metaphors and associations upon them, creating cultural meaning where none really exists. For this reason, a toothbrush head with a battery and vibrating motor attached could be perceived to be alive – even playful – although it has no real intelligence of what to speak. Capitalizing on people’s need to understand and bring meaning to the world, these devices exploit people’s prior experiences with other living creatures to offer meaning.
In this circumstance, the robotic agent actually benefits from behaving like other organisms, but not actually trying to be any of them. For starters, it can capitalize on people’s existing cultural association, and secondly, it does not risk falling into the “uncanny valley.” Therefore, it was not my goal to recreate existing forms. There was no point. The biological organisms that I am studying already exist in a perfectly fine manner. Instead, it is my goal to capitalize on the existing social responses these forms trigger in humans. This could easily be done without perfect replication.
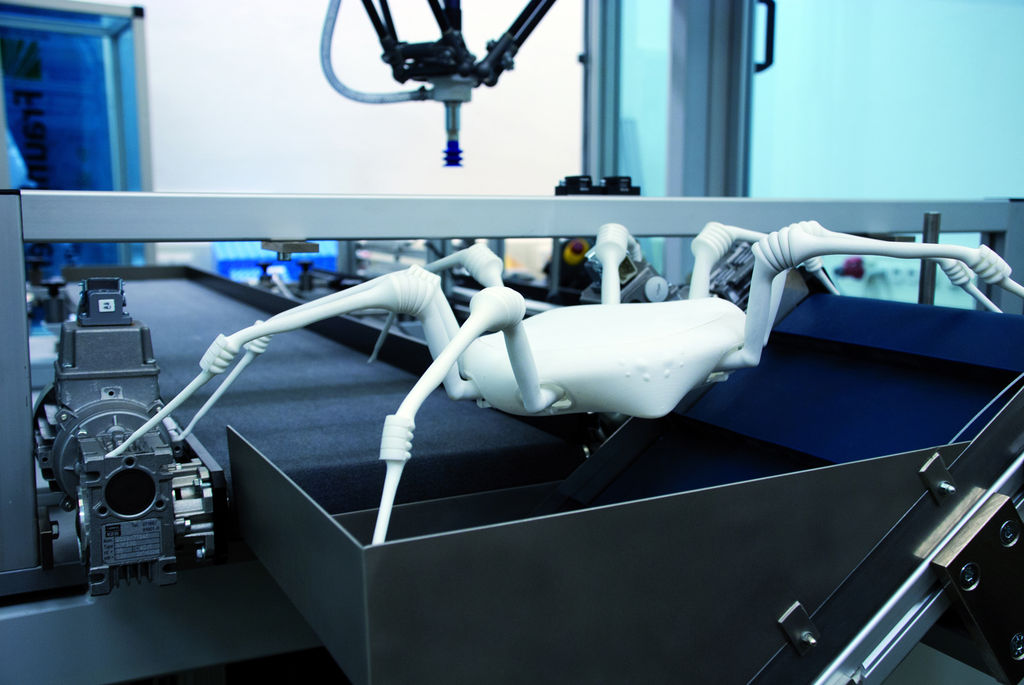
Rather than recreate a spider or squid, I have set out to create a new “species” which could be perceived as spider-like or squid-like. Ultimately, I am building robotic creatures which could be perceived as autonomous – perhaps even intelligent – sentient organisms, but have little to no intelligence to speak of. In other terms, I strive for the robots to be perceived as living in a social context, rather than to exist as self-aware living organisms that try to be alive. Ultimately, it is not my goal to get behavioral responses out of robots, but behavioral responses out of humans.
Step 4: Predictable Unpredictability
As we relate to most other animals that behave in this manner, so can we also relate to robots. If motorized jumbles of zip tied plastic can convince people that they are displaying life-like behaviors, then this would lead me to believe that by making them even more life-like in form, I can convince people that these organisms are even more alive. Perhaps these creatures – which exist nowhere in nature – can even inspire people to take the leap of faith required to perceive them as entirely living.
Ultimately, I am building machines to mimic attributes of living organisms in order to act upon humans associations and force emotional reactions. On some level, this is an absurd interaction in which intelligent organisms empathize with a machine that has no cognition whatsoever.
Step 5: Initial Biomechanical Models
Step 6: The Arm
There are 24 muscle groups that contribute to the movement and stability of the shoulder. Of these, seventeen are in some way attached to the shoulder blade, which is a free floating bone that both counterbalances and provides a suport for the arm’s rotation in the ball socket. There is only one traditional bone joint connecting the shoulder to the rest of the body (from the collarbone to the breastbone). Otherwise, the shoulder is largely held in place by tendons, ligaments, cartilage and muscle. Also worth noting, many of these muscles are long muscles that stretch down the length of the back and chest.
To translate these into robotic terms would have necessitated a larger support structure than the small modular joints I intended to build. Additionally, even if I were to simplify the shoulder musculature to only include the muscles required for forceful motion, I still would have needed a significant number of artificial muscles. It was my conclusion that as a point of departure towards a generalized human joint, the shoulder was less than ideal due to its uniqueness and complexity in structure.
Fortunately, not much further down the arm, one finds the elbow. The elbow is a textbook hinge joint. It also has a relatively simple pairing of muscles, which are responsible for expanding and contracting the joint along a 140 degree arc. The other notable characteristic of this hinge joint is that it not only mirrors a number of other human joints including the knee, and finger joints, but also mirrors hinge joints in a host of other species. These include, but are no means limited to lizards, dogs, horses, turtles, and elephants. In terms of a mechanism that would be key for generalized life-like locomotion, the hinge joint seemed like a good starting point.
The joint itself is relatively basic. It consists of two bones separated by cartilage and held together by four ligaments. Muscles then attach to the bones with tendons to create a third-class lever. By contracting and releasing the muscles the forearm lifts and lowers. Beyond that, there is not too much more to understand in the way of basic functionality. It is a very simple biomechanical model, which makes it an ideal form to explore in terms of robotics.
In case you are unfamiliar with your own elbow, check this out:
Step 7: The Spider Leg
Most joints in the spider are controlled by traditional flexor and extensor muscles. However, two of the joints only have the presence of flexor muscles. By regulating the pressure in these joints and using muscles to pull against them, the spider is able to generate substantial force. These joints also have mechanical reversible properties, which means that the joints can not only stiffen to provide support, but can also aid in creating a frame for bend deformations in multiple directions. This use of muscle to create a structural frame is similar to the manner in which cephalopod tentacles operate.
Albeit my initial guesstimation was that a spider’s leg consisted of 5 segments, I was surprised to learn that it actually has 7 discrete segments. Additionally, each segment has a unique and considerable range of motion. This makes the spider leg much more robust than I initially anticipated.
In terms of the type of joints that comprise its leg – aside from the two partially hydraulic joints – the structure is not very remarkable. The spider’s joints consist entirely of hinge joints, like the one found in the human elbow. However, what sets them apart from human joints is the ability for a number of them to significantly bend along 2 axis.
From this basic research, it has become clear that in order to properly mimic a spider’s leg, the robot is going to need a heckuva lot of segments and actuators. Alternately, if the goal is not to perfectly mimic a spider, but to build a modular joint, then it will not look remarkably different from the human elbow joint. That said, I found the partially hydraulic joints very interesting for further research. Much of my early research revolved around the attempt to create hinge joints that included hydraulic elements.
Step 8: The Tentacle
The most fascinating biomechanic that I explored was the tentacle. A tentacle is a muscular hydrostatic support system. The tentacle structure consists entirely of dense three dimensional array of muscle. Typically this consist of two groupings; one of which is a bundle of long longitudinal muscles, and the other outer group is arranged in a slanted manner around the inner bundle. Volume within the tentacles is constant. Any decrease of muscle in any given direction must result in an increase in another. The muscles are arranged such that all three dimensions can be actively controlled.
The three main ways to describe tentacle movement include:
Reach – Increase in distance between proximal and distal portions of the tentacle.
Pull – Decrease in distance between proximal and distal portions of the tentacle.
Explore – No change in distance. Laterial movements with localized sharp bending and torsion
They are also capable of four basic deformations which can occur at any point at any time. These deformations are elongation, shortening, bending, and torsion (twisting). These deformations occur at “pseudo joints,” which are localized arm bends that serve as pivot points.
When underwater, Cephalopods are roughly neutrally buoyant, and are typically marginally denser than sea water. On account of their bouncy and range of motion, they are capable of a highly dynamic behavior, and are well adapted to this environment.
Here are some examples of octopi moving in water:
Since most of the research centered around these organisms focus on their movement in an aquatic environment, it only later dawned upon me that the dynamism of cephalopods was severely limited by gravity when the creature was removed from water. Albeit I could not find any research supporting this idea, I was able to find a number of videos showing how octopi move outside of water. My observations of these videos have led me to conclude that my initial hypothesis was a fairly accurate assumption.
For more detail: 3D-Printed Biologically-Inspired Robotics