Balance Beam Controller
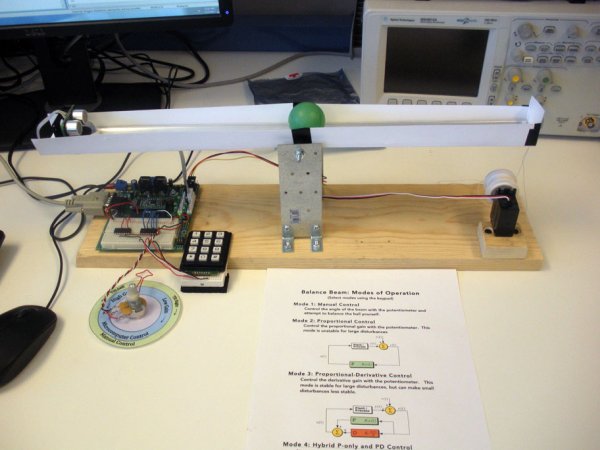
The purpose of our final project was to create an unstable system that would allow us to investigate classical control design methods by controlling the system using a microcomputer. This was accomplished by creating a teeter-totter that pivoted around a central fulcrum and was controlled by a servo. The beam acted as a track for […]