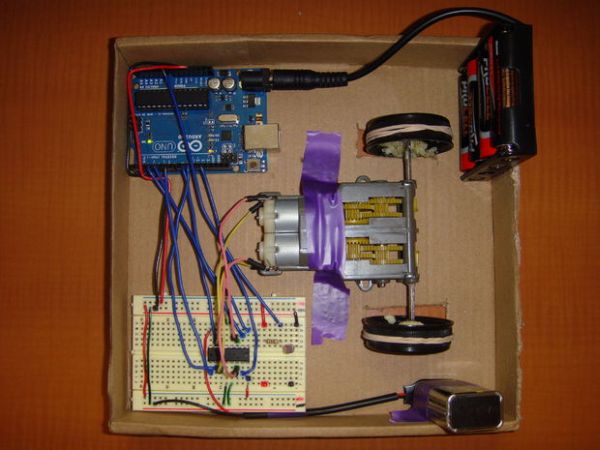
The objective is to construct a programmable hobby bot that is affordable and simple to make. The parts will be purchased from places such as Wal-Mart, Radio-Shack, any Hobby Store, or online store that is accessible to the public. The price range is 50 dollars or lower for the entirety of the robot.
Step 1: Gather Your Materials
Here is a list of all materials needed to complete the bot and their prices.
–Arduino Uno (The Brain)
http://www.bestofferbuy.com/Arduino-UNO-2011-ATmega328PPU-ATmega8U2-USB-Board-with-USB-Cable-p-77195.html?currency=USD&utm_source=gbase&utm_medium=cse&utm_campaign=gbase_usa&
gclid=CPOc5f7p9bYCFQsy4AodOV4AXg
Price: $18.20
–4xAA to barrel jack holder (Power for the Brain)
https://www.sparkfun.com/products/09835
Price: $2.49
–9V Snap Connector (Power for the motors)
https://www.sparkfun.com/products/91
Price: $1.25
–Dual Motor Gearbox
https://www.sparkfun.com/products/319
Price: $10.95
–Motor Driver (Logic Controller between Arduino and Motors)
https://www.sparkfun.com/products/315
Price: $2.35
–Light Sensor
https://www.sparkfun.com/products/9088
Price: $1.50
–Breadboard
https://www.sparkfun.com/products/9567
Price: $5.95
–Hook-up Wire
https://www.sparkfun.com/products/8022
Price: $2.50
–Resistor 10k Ohm
https://www.sparkfun.com/products/10466
Price: $0.50
–Wheels
Two minute maid juice lids were used
with rubber bands wrapped around them
for traction.
–Frame
Any good sized cardboard box
Total Price:
$45.69
(Go buy a towel with the change in case panic ensues)
Some additional notes about the parts list:
Batteries not included.
There are multiple colors of hook up wire that can be used. For the sake of being able to see how I wired everything shown in later steps I used multiple colors.
I did use jumper wires for the leads on the motors again for the sake of having a different color. The hook up wire should suffice.
Step 2: Gather Your Tools
Tools you will need:
-Soldering Iron
-Electrical Tape
-Knife
-Super/Hot Glue
-Wire Strippers
-Sharpies (Red, Green, Black, Blue)
Step 3: Assemble The Gearbox & Attach The Wheels

I chose this step to be first for two reasons
1. If you are using gorrila glue it takes about 2 hours to dry and harden completely.
2. The gearbox assembly is the most complicated portion of the construction.
If you are using gorilla glue remember that both surfaces need to be wet in order for the glue to activate.
Use of a hot glue gun reduces the time by quite a bit and reduces the amount of mess created.
Sparkfun provides a wonderful tutorial on assembling the gearbox linked below.
https://www.sparkfun.com/products/319
Step 4: Soldering the leads on the motors
After the leads have been soldered on you can place the motors in the gearbox.
Now to move on to the wiring of the breadboard and Arduino.
Step 5: Prep the 9V snap connector
The 9V is what is going to power the motors and this will be done through the breadboard the picture above shows what the leads need to look like after stripping them.
I found a piece of heat wrap to put around the loose wires so they would not catch on anything and provide them with a bit of protection.
Step 6: Preparing the Bread Board
Place the H-driver in the breadboard positioned so that pin 1 is in slot 10 E.
The Top left pin is pin one. The Top of the H-Bridge Can be determined by looking for the indent in the chip.
Color the bread board with the sharpie markers accordingly.
All GND/Ground slots will be black.
All 5V/Power slots will be red
All of the motor ports will be green
All of the ports going to the logic pins on the Arduino board will be blue.
I put a black or red line above and below each column on the left and right of the board as a visual reference that the entire column is charged or grounded.
Instructables provides a great description of how breadboards work in the link below.
http://www.instructables.com/id/How-a-Breadboard-Works/
Step 7: Wiring The Breadboard and Arduino
When wiring the breadboard to the Arduino keep the following in mind:
On the H Bridge pins 1 and 9 (1,2EN, 3,4EN respectively) need to be connected to a pin on the arduino that has a “~” so that it can receive speed signals.
Cut the wire longer than you need it. You can always shorten a wire, making one longer is difficult.
Notes:
The Positive and Ground leads seen attached to the far right of the breadboard belong to the 9V snap connector.
I ran out of black wire and though green is commonly used as a color for ground/negative lines I used a sharpie to color them black for visual purposes.
You do not need to bend the wire or even cut them as exactly as I did, again this was for visual purposes only and is a bit more difficult than necessary.
Step 8: Adding a photoresistor
The leads on the photoresistor and resistor can be left at the length they are at or cut shorter.
For more detail: Fifty Dollar Box Bot