This designed circuit embodies the improvements made to quadcopters. It is now used in military operations to prevent terrorism. It provides real-time images with more detailed recordings. It can be programmed to do task on its own. It also provides more options compared to a land based robot.
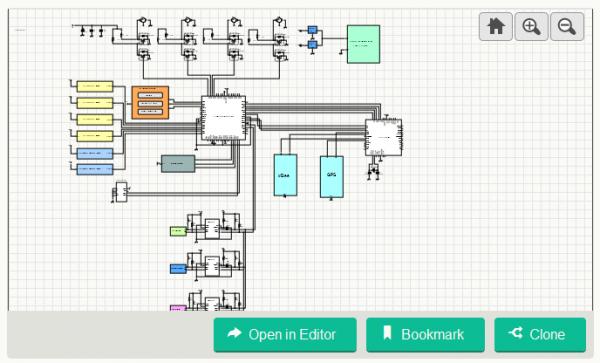
The circuit is comprised of a PIC24FJ128GA306T-I/MR 16-bit microcontroller with extreme low-power operation. It generates instructions and other functions for the entire system. The SC16C2550BIB48 is a two channel Universal Asynchronous Receiver and Transmitter(UART) which is used to interface serial devices to the main system. The PCA9306DC dual bidirectional I2C-bus and SMBus voltage-level translator that ensures voltage protection between two devices with different voltage rating. The xBee transceiver is used for data instructions communication. The GPS is used for the location identification. The gyroscope is used for the proper orientation or stabilization of the drone. The magnetometer is used to detect magnetic fields for compass and other application related to metals. The barometer is used to detect pressure above sea level for aerial operation assurance. The accelerometer is for inertial navigation systems and also for drone flight stabilization. The PCF85103C-2T is a external EEPROM is used as additional memory for data instruction management with fault tolerance to single bit errors. The IR Proximity Sensor and Ultrasonic Ranging Sensor are used in parallel for more accurate obstacle and distance ranging regardless of what type of materials that surrounds the drone. The Fatshark 600TVL FPV tuned CMOS FPV camera is used to capture real-time images for its operations and recordings. The IRF7307 is a power MOSFET for the switching and motor control operation of the system. The Motors used are brushless outrunner motor 1000kv of Parallax that is for direct driving electric aircraft propellers. The Lithium Ion Battery Array is a customized battery pack of Panasonic NCR18650B which is perfect for Unmanned Aerial Vehicle(UAV) application and it is provided with voltage regulators for 5V and 3.3V rated devices. The capacitors after the source are used as filters and stabilizers.
For more detail: Auto Pilot Drone Quadcopter Using Arduino