Summary of Arduino Mega Pinout Diagram
The Arduino Mega (Mega 2560) is an ATmega2560-based microcontroller board with 54 digital I/O (15 PWM), 16 analog inputs, four UARTs, 256 KB flash, 8 KB SRAM, and 4 KB EEPROM. It runs at 16 MHz, can be powered via USB or external 7–12V supply, supports SPI/TWI, auto-reset via DTR, and is compatible with many Arduino shields. The board is open-source with available schematics and can be programmed via the Arduino IDE or ICSP.
Parts used in the Arduino Mega Introduction:
- ATmega2560 microcontroller (ATmega1280 mentioned for Mega introduction context)
- ATmega16U2 (or ATmega8U2 on rev1/rev2) USB-to-serial converter
- 16 MHz crystal oscillator
- Voltage regulator (on-board)
- Resettable polyfuse for USB protection
- Power jack (DC barrel jack)
- ICSP header
- USB connector
- AREF pin
- Reset button/pads (RESET and RESET-EN trace)
Arduino Mega Introduction:
An Arduino Mega is an electronic circuit board known as a microcontroller that uses ATmega1280. This offers 54 pins, which can be set to input and output variations, and 14 for analog and pulse output signals. There are also 16 analog input pins for reading analog voltage levels. The board has 4 UART hardware serial ports, operates from a 16 MHz crystal oscillator, and can interface with a computer via USB or be powered independently using an AC adapter or battery. It offers all the necessary support circuitry for the microcontroller in a single package. To start working with the Arduino Mega, it is enough to connect it to a PC or a power supply; there is no need for other circuits. It is also possible to use many boards for expansion shields of Arduino Duemilanove and Diecimila types because of their similarity in the connection layout.
Arduino Mega Pinout Diagram:
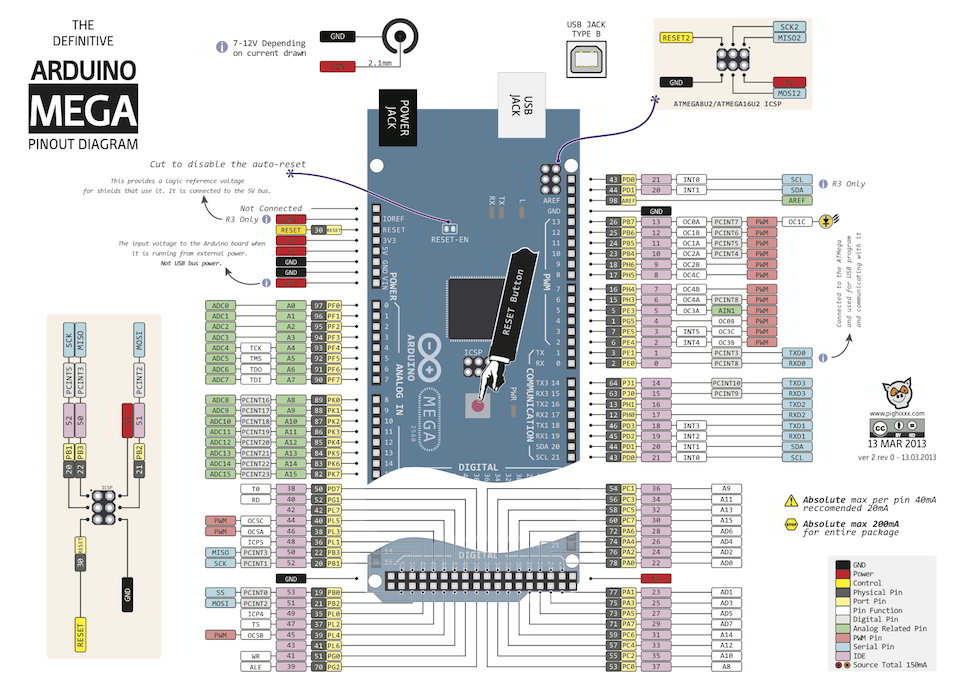
Arduino Mega Specifications:
| Microcontroller | ATmega1280 |
| Operating Voltage | 5V |
| Input Voltage (recommended) | 7-12V |
| Input Voltage (limits) | 6-20V |
| Digital I/O Pins | 54 (of which 15 provide PWM output) |
| Analog Input Pins | 16 |
| DC Current per I/O Pin | 40 mA |
| DC Current for 3.3V Pin | 50 mA |
| Flash Memory | 128 KB of which 4 KB used by the bootloader |
| SRAM | 8 KB |
| EEPROM | 4 KB |
| Clock Speed | 16 MHz |
OSH: Schematics
Arduino Mega 2560 is open-source hardware! You can build your board using the following files:
EAGLE FILES IN .ZIPSCHEMATICS IN . PDFBOARD SIZE IN.DXF
Programming
The Mega 2560 board can be programmed with the Arduino Software (IDE). For details, see the reference and tutorials.
The ATmega2560 on the Mega 2560 comes preprogrammed with a bootloader that allows you to upload new code to it without the use of an external hardware programmer. It communicates using the original STK500 protocol (reference, C header files).
You can also bypass the bootloader and program the microcontroller through the ICSP (In-Circuit Serial Programming) header using Arduino ISP or similar; see these instructions for details.
The ATmega16U2 (or 8U2 in the rev1 and rev2 boards) firmware source code is available in theArduino repository. The ATmega16U2/8U2 is loaded with a DFU bootloader, which can be activated by:
- On Rev1 boards: jumping the solder jumper on the back of the board, near the map of Italy, and than resetting the 8U2.
- On Rev2 or later boards: a resistor brings the 8U2/16U2 HWB line to the ground level and facilitates the going to the DFU mode. You can then use Atmel’s FLIP software (Windows) or the DFU programmer (Mac OS X and Linux) to load a new firmware. Or you can use the ISP header with an external programmer (overwriting the DFU bootloader). See this user-contributed tutorial for more information.
Warnings
The Mega 2560 has a resettable polyfuse that protects your computer’s USB ports from shorts and overcurrent. Although most computers provide their internal protection, the fuse provides an extra layer of protection. If more than 500 mA is applied to the USB port, the fuse will automatically break the connection until the short or overload is removed.
Power
The Mega 2560 can be powered via a USB connection or with an external power supply. The power source is selected automatically.
The power that is not USB can be AC to DC adaptor commonly known as a wall-wart or a battery. This literally can be done by plugging a 2. Solder a 1mm center-positive plug into the board’s power jack connect it to a 9V battery and connect the GND to the little GND pad beside the USB connector. Those leads from a battery can be connected to the GND and Vin pin locations of the POWER connector.
The board can take its operating power supply from an external source that can range from 6 to 20 volts. But if the board is supplied with less than 7V the 5V pin supplies less than 5V, and the board in turn becomes unstable. When using something more than 12V, the voltage regulator becomes sloppy hot and so damages the board. It is preferable to range between 7 to 12 volts.
The power pins are as follows:
- Vin. This gets supplied to the board when the board is connected to an external supply voltage other than the 5 V from a USB connection or any other regulated voltage source. Through this pin, voltage can be supplied, or, if supplied through the power jack, the voltage can be obtained from this pin.
- 5V. This pin outputs a regulated 5V from the regulator on the board. The board can be supplied with power either from the DC power jack (7 – 12V), the USB connector (5V), or the VIN pin of the board (7-12V). Supplying voltage via the 5V or 3.3V pins bypasses the regulator, and can damage your board. We don’t advise it.
- 3V3. A 3.3 volt supply is generated by the on-board regulator. Maximum current draw is 50 mA.
- GND. Ground pins.
- IOREF. This pin on the board provides the voltage reference with which the microcontroller operates. A properly configured shield can read the IOREF pin voltage and select the appropriate power source or enable voltage translators on the outputs for working with the 5V or 3.3V.
Memory
The ATmega2560 has 256 KB of flash memory for storing code (of which 8 KB is used for the bootloader), 8 KB of SRAM, and 4 KB of EEPROM (which can be read and written with the EEPROM library).
Input and Output
See the mapping between Arduino pins and Atmega2560 ports:
Each of the 54 digital pins on the Mega can be used as an input or output, using pinMode(),digitalWrite(), and digitalRead() functions. They operate at 5 volts. Each pin can provide or receive 20 mA as recommended operating condition and has an internal pull-up resistor (disconnected by default) of 20-50 k ohm. A maximum of 40mA is the value that must not be exceeded to avoid permanent damage to the microcontroller.
In addition, some pins have specialized functions:
- Serial: 0 (RX) and 1 (TX); Serial 1: 19 (RX) and 18 (TX); Serial 2: 17 (RX) and 16 (TX); Serial 3: 15 (RX) and 14 (TX). Used to receive (RX) and transmit (TX) TTL serial data. Pins 0 and 1 are also connected to the corresponding pins of the ATmega16U2 USB-to-TTL Serial chip.
- External Interrupts: 2 (interrupt 0), 3 (interrupt 1), 18 (interrupt 5), 19 (interrupt 4), 20 (interrupt 3), and 21 (interrupt 2). These pins can be configured to trigger an interrupt on a low level, a rising or falling edge, or a change in level. See the attachInterrupt() function for details.
- PWM: 2 to 13 and 44 to 46. Provide 8-bit PWM output with the analogWrite() function.
- SPI: 50 (MISO), 51 (MOSI), 52 (SCK), 53 (SS). These pins support SPI communication using theSPI library. The SPI pins are also broken out on the ICSP header, which is physically compatible with the Arduino /Genuino Uno and the old Duemilanove and Diecimila Arduino boards.
- LED: 13. There is a built-in LED connected to digital pin 13. When the pin is HIGH value, the LED is on, when the pin is LOW, it’s off.
- TWI: 20 (SDA) and 21 (SCL). Support TWI communication using the Wire library. Note that these pins are not in the same location as the TWI pins on the old Duemilanove or Diecimila Arduino boards.
See also the mapping Arduino Mega 2560 PIN diagram.
The Mega 2560 has 16 analog inputs, each of which provides 10 bits of resolution (i.e. 1024 different values). By default they measure from ground to 5 volts, though is it possible to change the upper end of their range using the AREF pin and analogReference() function?
There are a couple of other pins on the board:
- AREF. Reference voltage for the analog inputs. Used with analogReference().
- Reset. Bring this line LOW to reset the microcontroller. They are typically used to add a reset button to shields that block the one on the board.
Communication
The Mega 2560 board possesses some facilities that allow to communicate with a computer, another board or other microcontrollers. The ATmega2560 has available four hardware UARTs for the TTL (5V) serial connection. These are interfaced through an ATmega16U2 (ATmega 8U2 Power over USB and includes a channel that provides a Virtual Com Port to all software in the Computer; Historically Windows computers require an . inf file to work while UNIX and APPLE MAC computers somehow receive and identify the board as a COM port A serial monitor in the Arduino Software (IDE) allows simple text data to be sent to or received from the board. Both the RX and TX indications on the board will blink whenever data is being transferred through the ATmega8U2/ATmega16U2 and the USB interface to the computer though not for the serial activity on pin 0 and 1.
A SoftwareSerial library allows for serial communication on any of the Mega 2560’s digital pins.
The Mega 2560 also supports TWI and SPI communication. The Arduino Software (IDE) includes a Wire library to simplify the use of the TWI bus; see the documentation for details. For SPI communication, use the SPI library.
Physical Characteristics and Shield Compatibility
The maximum length and width of the Mega 2560 PCB are 4 and 2.1 inches respectively, with the USB connector and power jack extending beyond the former dimension. Three screw holes allow the board to be attached to a surface or case. Note that the distance between digital pins 7 and 8 is 160 mil (0.16″), not an even multiple of the 100 mil spacing of the other pins.
The Mega 2560 is designed to be compatible with most shields designed for the Uno and the older Diecimila or Duemilanove Arduino boards. Digital pins 0 to 13 (and the adjacent AREF and GND pins), analog inputs 0 to 5, the power header, and the ICSP header are all in equivalent locations. Furthermore, the main UART (serial port) is located on the same pins (0 and 1), as are external interrupts 0 and 1 (pins 2 and 3 respectively). SPI is available through the ICSP header on both the Mega 2560 and Duemilanove / Diecimila boards. Please note that I2C is not located on the same pins on the Mega 2560 board (20 and 21) as the Duemilanove / Diecimila boards (analog inputs 4 and 5).
Automatic (Software) Reset
Rather than requiring a physical press of the reset button before an upload, the Mega 2560 is designed in a way that allows it to be reset by software running on a connected computer. One of the hardware flow control lines (DTR) of the ATmega8U2 is connected to the reset line of the ATmega2560 via a 100 nanofarad capacitor. When this line is asserted (taken low), the reset line drops long enough to reset the chip. The Arduino Software (IDE) uses this capability to allow you to upload code by simply pressing the upload button in the Arduino environment. This means that the bootloader can have a shorter timeout, as the lowering of DTR can be well-coordinated with the start of the upload.
This setup has other implications. When the Mega 2560 board is connected to either a computer running Mac OS X or Linux, it resets each time a connection is made to it from software (via USB). For the following half-second or so, the bootloader is running on the ATMega2560. While it is programmed to ignore malformed data (i.e. anything besides an upload of new code), it will intercept the first few bytes of data sent to the board after a connection is opened. If a sketch running on the board receives one-time configuration or other data when it first starts, make sure that the software with which it communicates waits a second after opening the connection and before sending this data.
The Mega 2560 board contains a trace that can be cut to disable the auto-reset. The pads on either side of the trace can be soldered together to re-enable it. It’s labeled “RESET-EN”. You may also be able to disable the auto-reset by connecting a 110-ohm resistor from 5V to the reset line; see this forum thread for details.
Revisions
The Mega 2560 does not use the FTDI USB-to-serial driver chip used in past designs. Instead, it features the ATmega16U2 (ATmega8U2 in the revision 1 and revision 2 Arduino boards) programmed as a USB-to-serial converter.
Revision 2 of the Mega 2560 board has a resistor pulling the 8U2 HWB line to the ground, making it easier to put into DFU mode.
Revision 3 of the Arduino board and the current Genuino Mega 2560 have the following improved features:
- 1.0 pinout: SDA and SCL pins – near the AREF pin – and two other new pins placed near the RESET pin, the IOREF that allow the shields to adapt to the voltage provided by the board. In the future, shields will be compatible both with the board that uses the AVR, which operates with 5V, and with the board that uses ATSAM3X8E, which operates with 3.3V. The second one is a not connected pin, that is reserved for future purposes.
- Stronger RESET circuit.
- Atmega 16U2 replace the 8U2.
Source: Arduino Mega Pinout Diagram
- What microcontroller does the Arduino Mega use?
The Arduino Mega uses the ATmega2560 microcontroller (ATmega1280 referenced in the introduction context). - How many digital and analog pins does the Mega provide?
It provides 54 digital I/O pins (15 with PWM) and 16 analog input pins. - How can the Mega be powered?
The Mega can be powered via USB or an external supply (recommended 7–12V, limits 6–20V). - Can the Mega be programmed without an external programmer?
Yes, it comes preprogrammed with a bootloader allowing uploads via the Arduino IDE over USB. - What communication interfaces does the Mega support?
It supports four hardware UARTs (serial), SPI, and TWI (I2C) communication. - What protects the computer USB port from overcurrent?
A resettable polyfuse on the board protects the computer USB port from shorts and overcurrent. - How does automatic (software) reset work?
The ATmega16U2 toggles the DTR line through a 100 nF capacitor to reset the ATmega2560, enabling automatic reset for uploads. - Are shields compatible with the Mega?
The Mega is designed to be compatible with most shields for Uno, Duemilanove, and Diecimila, though I2C pins differ. - What are the memory specifications of the Mega?
It has 256 KB flash (8 KB used by bootloader), 8 KB SRAM, and 4 KB EEPROM. - How much current can the 3.3V pin supply?
The 3.3V pin can supply up to 50 mA maximum.