Goals
Hello all.
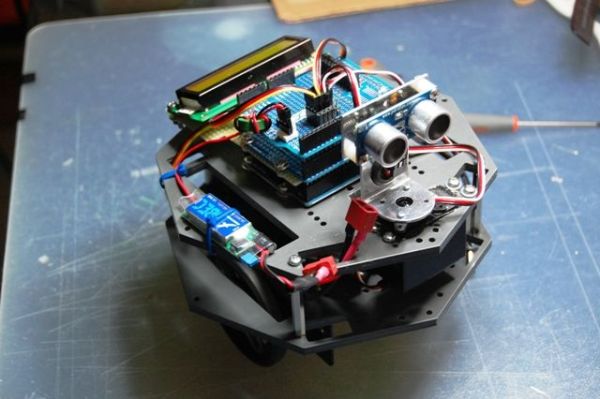
I hope to please share a little robot that I have just finished building.
There are many Ping Boat, perhaps with a tutorials and display less so without pretension, will illustrate what I could do.
I gave myself the goal of realizing a robot that avoids obstacles, hence the use of Ping, who had more autonomy (and less hassle to reload always stylus) and displayed on a LCD display the distance measured obstacle.
The tutorial is directed for beginners but with knowledge of electronics and Arduino programming.
Step 1: List of Materials
1 – Arduino UNO or compatible
2 – Module OCTAGON GioBlu Robotics http://www.gioblu.com/prodotti?page=shop.product_details&flypage=flypage_images.tpl&product_id=136&category_id=60 or other frame
1 – Ping))) Parallax mounting bracket kit http://www.parallax.com/Store/Robots/AllRobots/tabid/755/ProductID/248/List/0/Default.aspx?SortField=ProductName,ProductName
2 – Servo motors with 360 rotation , in my case HSR-1425SCR
2 – 6 cm wheels with rubber no-slip
1 – std servo for the Ping (in my case is not required but can be implemented)
2 – servo brackets Gioblu Robotics http://www.gioblu.com/prodotti?page=shop.product_details&flypage=flypage.tpl&product_id=78&category_id=34
4 – PCB spacers from 4 cm http://http://www.robot-italy.com/product_info.php?cPath=7_135&products_id=1189
2 – protoschield for servos, battery and display and added http://www.robot-italy.com/product_info.php?products_id=879(or other sites)
1 – 16×2 HD44780 compatible LCD Display http://www.robot-italy.com/product_info.php?cPath=59_194&products_id=237
1- potentiometer
1 – 9v battery holder
1 – 2s Lipo 1200mAh 7.4 v
1 – UBEC 5.4 / 6V http://www.cnchelicopter.com/servlet/the-1528/hobbywing-UBEC-dsh-3A-(2-dsh-6S-Lipo/Detail
1 – pivot wheel
1 – piece of matrix board for the display shield
– some strip for shield
– some screw patience and passion..
Step 2: SERVO SHIELD CONSTRUCTION
First we begin by shield, why I have chosen this path?. When you need to connect several servo motors, a sensor, batteries etc, of course, there are several PIN signals, power supply and ground to use.
Normally the various little robots are joined by a breadboard to allow you to manage everything at the expense of a lot of threads around that maybe every time you disconnect and still always give a feeling of chaos.
A shield to be attached to Arduino simplifies everything and makes it more convenient connections. As you know for the servos or motors there are already on the market different and functional, eg one or dell’Adafruit or SparkFun, in any case the realization in the house is very simple and inexpensive.
As you can see from the first two photos are soldered several rows of three legs (I have made ââ6, but you can add several more), each leg corresponds to the three poles of the servo and the sensor (signal, 5v, gnd -white/red/black or yellow/red/back). Then sold in parallel (third photo) the 5v (center pin) and GND (pictured blue wire) and the latter connected to the power connector, so all you will connect to the row of pins will be powered together.
For the signal pin, you can decide if you knew at the start (as in my case) corresponds to which pin, solder a wire directly to the corresponding pin, or if you want to manage it from time to time just add (second photo), a row of strip females to connect with a wire to the desired pin. In the above I added a reset button and a LED connected to pin 13 directly to Arduino board.
Step 3: LCD SHIELD CONSTRUCTION
Skipping of course, as you will find dozens of tutorials on how to connect one display to Arduino board eg
http://arduino.cc/en/Tutorial/LiquidCrystal
but I repeat, if you want to take the opportunity to enter into the project, which necessary to reduce the number of wires around that in this case are several, so we can again make a shield that can be useful for other projects with the Arduino.
Of the 16 pins of a display, only 12 are needed for our purpose.
If you look at the first and third photo should crop a breadboard that will serve us well as a support for the display, and like a “bridge” connecting to the Arduino pins.
So what should we do, sold (I have soldered slightly inclined, as shown in picture 2, in order to better read the display) a female strip of 16 feet to the matrix board, make from each pin that is used (see the tables below) a wire soldered directly to the corresponding pin of Protoshield, then we’re going to overlap to the Arduino board and above this shield (last photo) will get that one made for the servo and sensor with zero visible wires.
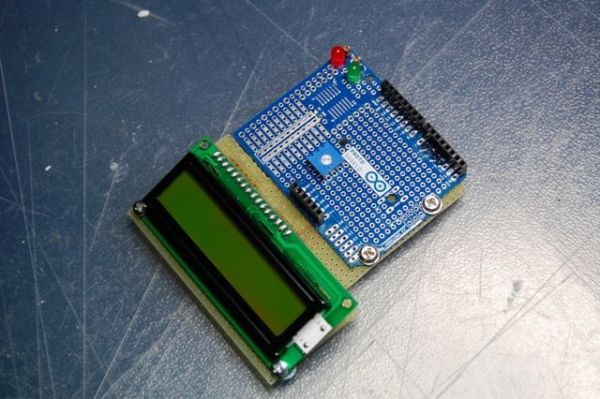
The last photo is the display in operation.
Step 4: TABLE FOR THE CONNECTIONS
| PIN | connect to | |||||
| 1 | GND | |||||
| 2 | 5V | |||||
| 3 | (Central Pin of the POT – Add to this one wire to 5v and one to GND) | |||||
| 4 (RS) | 3 | |||||
| 5 (RW) | GND | |||||
| 6 (EN) | 4 | |||||
| 11(DB4) | 5 | |||||
| 12(DB5) | 6 | |||||
| 13(DB6) | 11 | |||||
| 14(DB7) | 12 | |||||
| 15 | 5V | |||||
| 16 | GND | |||||
| Ping Servo Signal Pin 10 | ||||||
| Led to Pin 13 | ||||||
| Ping Sensor Signal Pin 7 | ||||||
| DX Wheel Pin 9 | ||||||
| SX Wheel sx Pin 8 | ||||||
Put the display power under servo shield so it is managed by a battery’s capacity.
[box color=”#985D00″ bg=”#FFF8CB” font=”verdana” fontsize=”14 ” radius=”20 ” border=”#985D12″ float=”right” head=”Major Components in Project” headbg=”#FFEB70″ headcolor=”#985D00″]1 – Arduino UNO or compatible
2 – Module OCTAGON GioBlu Robotics
1 – Ping))) Parallax mounting bracket kit
2 – Servo motors with 360 rotation , in my case HSR-1425SCR[/box]
For more detail: My Arduino Ping Display Robot