This is a cleaner robot so you can give to your mommy or just use to clean your bedroom =P.
Material List:
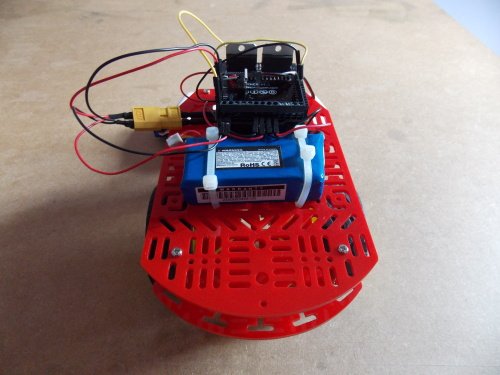
1x Shield Motor Driver (Shield 4Power)
1x Hand Sweeper
1x Battery
 1. How it works
1. How it works
When the robot is on, it moves forward and rotates the hand sweeper (for cleaning). If the sensor detects a wall in front of it, the robot will turn to the left and keeps moving forward.
2. Adaptations
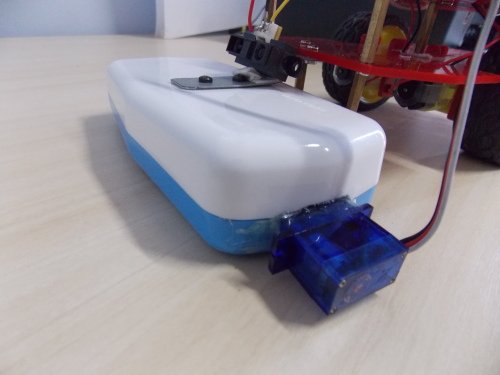
We have done adaptations to the servomotor so it could turn 360º the hand sweeper, as we can see in the pictures below:
To fix the distance sensor we used a tape foam double sided:
3. Robot Pictures
4. The Sketch
#include <S4power.h>
#include <Servo.h>
S4Power s4power;
Servo limp; //Attach “limp” for use the commands of the servo.h
int count1 = -20; //Speed of the Motor 1 (M3)
int count2 = -30; //Speed of the Motor 2 (M4)
int sensorValue; //Variable for get the distance sensor value
int vass = 9; //Attcha the D9 pin for the variable vass, cause the same will be used for control the servomotor
void setup()
{pinMode(vass, OUTPUT); //Attach the pin D9 (vass) as OUTPUT
s4power.Config(); //Configure the Motor Driver Shield (4Power)
limp.attach(vass); //Link the pin D9 to servomotor
limp.write (-180); //Roll the hand sweeper}
void loop()
{sensorValue = analogRead(A5); //Read the sensor value using the pin A5 and put int the variable.
if (sensorValue > 230) //If the sensor value more than 230(Near the wall), turn the robot.
{s4power.M3.speed = 0; //Stop Motor 1
s4power.M4.speed = 0; //Stop Motor 2
s4power.M3.Update(); //Update Motor 1
s4power.M4.Update(); //Uptade Motor 2
delay(500); //Wait 0,5 seconds
 s4power.M3.speed = -40; //Motor 1 move forward
s4power.M3.speed = -40; //Motor 1 move forward
s4power.M4.speed = 40; //Motor 2 move backward
s4power.M3.Update(); //Update Motor 1
s4power.M4.Update(); //Update Motor 2
delay(500); //Turn for 0,5 seconds}
else
{s4power.M3.speed = count1; //Motor 1 move forward
s4power.M4.speed = count2; //Motor 2 move forward
s4power.M3.Update(); //Update Motor 1
s4power.M4.Update(); //Update Motor 2}}
For more detail: Project: Cleaner robot using Magician Chassis, Arduino, distance sensor and hand sweeper