Summary of Power Quality Meter ( PQ Monitor) using Arduino
Concise summary: This Arduino UNO Power Quality Meter measures single-frequency AC (50/60 Hz) with a graphic LCD, reporting RMS, frequency, THD, and first five harmonics (up to 63 in RT). It uses a software PLL/FLL via Timer1 to force exactly 128 samples per period, eliminating windowing and enabling single-period FFT. Hardware is simple: transformer isolation, comparator LM311, voltage divider, RF filters, and a GLCD. Software runs real-time with low CPU load, averages 32 cycles for display, and limits harmonic reporting to seven harmonics due to ADC/memory constraints.
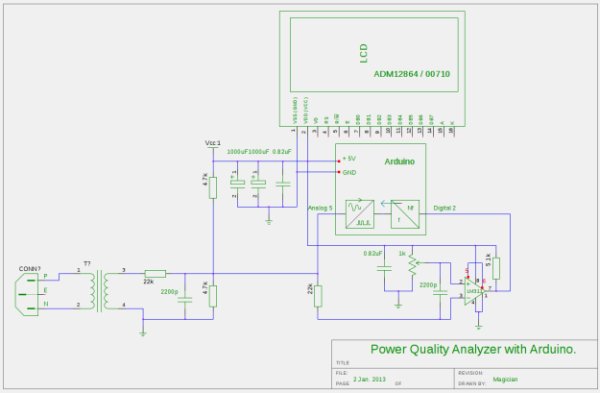
Parts used in the Power Quality Meter:
- Arduino UNO
- Graphic LCD 128×64 (SparkFun LCD-00710 used)
- Transformer for galvanic isolation (primary for 110V or 220V, ~10V secondary)
- LM311 comparator IC
- Resistive voltage divider (22k and two 4.7k shown)
- Trim potentiometer for comparator threshold
- Two 2200 pF capacitors for RF filtering
- Wiring and connectors to interface LCD and Arduino
- Power supply lines (+5V) with careful separation if LCD mounted on same board
Arduino UNO project, Power Quality Meter, someone would call it’s PQ Monitor or PQ Analyzer.
I had already published one blog devoted RMS voltage measurements on full band 20 – 20 000 Hz audio signals. ( Following my own style, I’d refer to already published materials whenever it’s possible ). This time measurements performed on single AC Power Grid frequency. ( 60 Hz in Canada. Algorithm would works with 50 Hz as well ).

Features:
- Graphic LCD display 128×64;
- First 5 harmonics presentation;
- RMS Voltage Indicator;
- Frequency Monitoring;
- THD calculation;
- Internal data up to 63-d !!! harmonics components in Real-Time;
The Holy Grail of this project, is a method of sampling input waveform. As there is only one main frequency (fundamental) at the input, I came up with idea to do a sampling period VARIABLE. There are at least 2 great advantages in this brilliant ( may I ? ) invention:
- It’s completely eliminate necessity of the windowing.
- Only ONE period of input waveform is enough for precise calculation.
First of all, windowing is really BAD on metrological side (for accuracy of results), smashing one single frequency bin to over 3 – 5 of it’s neighbors, significantly deteriorating input sensitivity, and plus it’s not able to eliminate limits discontinuity effects well – only attenuate them. Secondly, from software timing performance point of view, introducing windowing in the Real-Time application would automatically require to DOUBLE data throughput, as Overlap – Add procedure would be mandatory.
In it’s essence, I created a software PLL (Phase Lock Loop). Compare to a project with hardware based PLL (IC 74HC4046), no need for external chip this time. Engine is running on Timer1 features – CTC mode and capability to drive ADC Auto trigger. I will go into details in software section.
Hardware.
As you can see on the drawings, circuitry is quite simple, one LCD ( I used SparkFun LCD-00710, could be different ) and one IC, LM311 – comparator. Pay attention, that GEDA doesn’t have a library for such display, all details on LCD configuration, pin numbering etc you can find here. I haven’t experienced any difficulties with assembling LCD, except soldering bunch of wires and installing control brightness level pot. Thanks author of the GLCD library (great work!), there were no troubles with software also.
The transformer is providing galvanic isolation, as the saying goes – prioritizing safety! Any primary winding component for 110V or 220V AC power, without a specific part number, and with around 10V on the secondary side should work fine. The resistive voltage divider values (22k and 2 x 4.7k) can be modified in proportion for transformers with varying secondary voltage outputs. The key is to maintain a voltage level around 2V AC peak value on the arduino analog input # 5. There are two 2200 pF capacitors for filtering RF interference, and one trim pot for adjusting the threshold of the comparators (which could be replaced by a constant voltage divider using two resistors). If an LCD is installed on the same board as the Arduino, it is important to properly separate the +5V power lines to prevent the Arduino from malfunctioning due to excessive interrupts on pin 2 (INT0).
SOFTWARE.
I’ve read an article in December’s issue of the Elektor magazine, that actually inspired me on this project. Even I had such idea in my mind for quite awhile, nevertheless Elektor’s publication accelerate this process. Do you still remember I called my method “brilliant”? And this is why: compare to project published in well known and respectful electronics magazine, my code is running 140 !!! TIMES faster ( compare 5 milliseconds to 700 milliseconds competitors ). I didn’t tweak any optimization. My software is running REAL-TIME in each AC period, keeping load of the microprocessor below 30 %. It’s capable to do a Real-Time monitoring of three phase power line. The only things which is slow down process, is LCD display refreshment. In current version, algorithm averages data over 32 cycles before outputs summary data report on the display, around 0.53 seconds period ( 32 / 60 ). During update display procedure (23 milliseconds, or so) which is longer than 16.66 milliseconds period of the AC 60 Hz, one cycle is skipped. Depends on application, the task of updating screen could be split over many sub-frames, so instead of one big chunk of code, 32 smaller size pieces will go unnoticeable in background, fixing an issue of 33-rd lost frame. But I don’t think it’s necessary for monitoring purposes, may be only in Power Energy Meter project? I just can’t imagine, Elektor’s 2100 milliseconds overall time per cycle, when everything could be done in less than 7 milliseconds ( using split display subroutine ). It’s 300 times difference!.
THE MAGIC.
Software PLL / FLL – Frequency Lock Loop is build on TIMER1 VCO. Well, it’s not quite correct to call it VCO, probably FCO – Frequency Controlled Oscillator. Software adjusts oscillator in such a way, that number of captured samples per one AC waveform has to be exactly 128 . Look here:
if ( smpl_Nmbr > FFT_SIZE ) smpl_Time++;
if ( smpl_Nmbr < FFT_SIZE ) smpl_Time–;
OCR1A = smpl_Time;
OCR1B = smpl_Time;
If the timer restarts frequently during an AC period (1/60 Hz = 16.66 milliseconds) when FFT_SIZE is set to 128, the smpl_Time variable will increase, causing TIMER1 FCO to slow down. If not, smpl_Time decreases, causing the clock to speed up. The usual method of tracking the quantity of captured samples involves incrementing the input array variable smpl_Nmbr during every ADC “start conversion” event triggered by channel B.
ISR(TIMER1_COMPB_vect)
{
if ( smpl_Nmbr < FFT_SIZE )
{
x_r[smpl_Nmbr] = ADC – adc_Offst; //
}
smpl_Nmbr++;
}
( Paralleling Timers two channel A and B was invented here.) The comparators main duty is to trigger digital pin 2 (INT0) exactly in the same point in time, relatively to input signal periodicity. Not necessary at zero. Synchronization point could be at any voltage level on the input waveform, it’s has nothing to do with zero-crossing. As software calculates complete FFT subroutine, for both REAL and IMAGINARY part (btw, referring link) , adjusting point (via pot) to exactly zero-cross simply push all energy in imaginary part (sine). Bringing this point to 45 degree would splits energy equally between real and imaginary parts. Later on, extracting square root from sum of two squares ( magnitude calculation ) simply annihilate any difference, magnitude is not changing with moving synchronization point up and down at all.
DC offset is adjusted in every cycle based on REAL (cosine) bin-0 magnitude:
temp = f_r[0];
if ( temp > 0 )
adc_Offst++;
if ( temp < 0 )
adc_Offst–;
Rolling Filter, the easiest one to implement and understand, and very efficient against spikes.
Arduino UNO sketch: download.
I did some “resource management” in software, because data calculation in each cycle of AC waveform is not really necessary. Let me explain. There are 3 major hardware limits :
- ADC resolution
- Memory size / CPU performance
- Update Rate
In the initial iteration, the analysis of harmonic magnitude extends up to the 63rd harmonic. However, due to the Arduino ADC being limited to 10 bits (9 bits plus sign), it is not practical for real-world electrical grid applications because the magnitude of the 5th harmonics falls below the noise floor at -55.94 dB (0.16%). Two possible solutions are to increase the FFT size or utilize oversampling techniques. The initial approach cannot be implemented because of memory constraints. The second one results in a update rate that is too slow for practical purposes.
In this software update, I restrict calculations to the initial 7 harmonics and display all of them on the screen (refer to the photo). The size of the FFT remains unchanged at 128. With a lower sampling clock, it takes 8 AC cycles to populate the input array with new data. Technique – resampling in the temporal domain. It provides a 3-bit increase in resolution, equivalent to what is already present.
12-bit ADC, overall dynamic range 6.02 x 12 + 1.76 = 74 dB. (0.02%)
Version 2: download.
- What frequencies does the meter support?
The algorithm works with single AC power grid frequencies, specifically 60 Hz in the article and also 50 Hz. - How many samples per AC period are captured?
The software adjusts sampling so exactly 128 samples are captured per AC waveform period. - Does the project use hardware PLL?
No, it uses a software PLL/FLL implemented with Timer1 and ADC auto-triggering; no external PLL IC is required. - What harmonics are presented on the display?
The display shows the first five harmonics; internal data can include up to 63 harmonics in real time, but calculations were restricted to seven harmonics in the update. - Why is windowing unnecessary in this design?
Variable-period sampling locks to the input fundamental so only one period is needed, eliminating the need for windowing and its metrological drawbacks. - What components ensure input safety and signal scaling?
A galvanically isolating transformer and a resistive voltage divider scale the input to about 2V AC peak for the Arduino analog input. - How is DC offset handled?
DC offset is adjusted each cycle based on the real (cosine) bin-0 magnitude by incrementing or decrementing adc_Offst. - What limits harmonic analysis depth?
Arduino ADC resolution (10-bit), memory size, and CPU performance limit practical harmonic analysis depth, leading to a restriction to seven harmonics in the software update. - How often is display data updated?
Algorithm averages data over 32 cycles before updating the display, about every 0.53 seconds at 60 Hz.