Summary of Motion Controlled Robotic Arm
This project details the construction of a motion-controlled robotic arm using an Arduino Mega, servos, a gyroscope, and bend sensors. A glove worn by the user translates hand movements into robotic actions via sensors that control wrist rotation, deviation, and finger flexion. The design features touch-sensitive resistors for haptic feedback but notes limitations due to brittle Perspex material used in the fingers instead of aluminum.
Parts used in the Motion Controlled Robotic Arm:
- Arduino Mega
- 20kg-cm torque Servos (x3)
- 2kg-cm torque Servos (x5)
- 40kg-cm torque servo (x1 or x3)
- 3 axis gyro breakout board (L3G4200D)
- Force/Touch sensors (x5)
- Gloves (x2)
- Bend sensors/Resistors (x5 or x6)
- Small aluminium Plates
- Flat pc wire
- Connector pins
- BreadBoard
- Piano Wire 30cm pieces (x4)
- Glue Gun
- Saw for cutting aluminium/Perspex
- Wire cutters
- Nuts and bolts
This instructable is not complete, I will post code soon
The Arm:
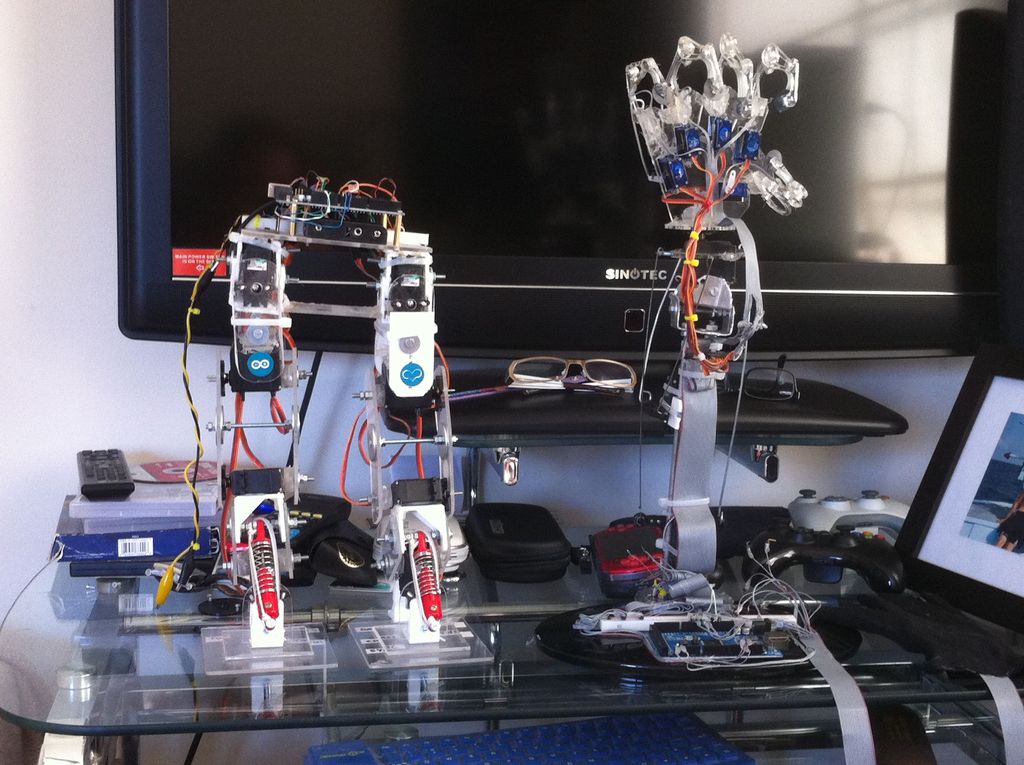
This instructable shows the process of building a robotic arm using servos, Arduino microprocessor, a gyroscope and multiple bend sensors.
The user wears a glove containing the gyroscope and bend sensors which translate the movement of the users hand into motion of the servos , in turn rotating the wrist and hand of the robotic arm.
The forearm has full motion of a human wrist namely: rotation, radial deviation (movement towards the thumb) ,ulnar deviation (movement towards the little finger) ,flexion (tilting towards the palm) and extension (tilting towards the back of the hand).
The Hand also has movement of the fingers, this is limited as a result of the brittle material used.
All movement is provided by the Servos attached to an extension wire or piano wire. Each having different torque depending on its position.
The fingers contain touch sensitive resistors which provide haptic feedback and allow the user to know when the fingers have grasped an object.
Step 1: Design
I found this design of the finger on the net which allows a single servo to provide full motion of curl of a human finger.The design works best when Aluminium is used for the cut outs of the fingers, but as I had perspex available I went with the weaker option which resulted in brittle fingers.
All the fingers are the same design but a variation of measurements, except for the thumb. they can be found below:
The designs below are the ones I sent through to a laser cutter here in Johannesburg for about R350 for all cuts and material.
they required the files to be sent in 2d DXF format, so if you alter the design in sketchup, make sure you export it in the correct format.
The rest of the cut outs are made up of wrist and palm sections.
index finger, middle finger, ring finger is roughly the same size.
pinky is slightly smaller than other fingers.
Thumb has different dimentions
 complete.skp
complete.skp complete2d2.dxf
complete2d2.dxf hand2.skb
hand2.skbStep 2: Materials
– 20kg-cm torque Servos for wrist movement x3
– 2kg-cm torque Servos for fingers x5
– Atleast 40kg-cm torque servo for elbow and shoulder x1 or x3
– 3 axis gyro breakout board (I used a L3G4200D, any will do).
– Force/Touch sensors x5
– Gloves x2
– Bend sensors/Resistors x5 (or 6 if you wish to build an elbow).
– Some small aluminium Plates.
– Length of flat pc wire.
– Connector pins.
– BreadBoard.
– Piano Wire 30cm pieces x4
Tools:
– Glue Gun
– saw to cut aluminium/Perspex
– Wire cutters
– nuts and bolts
Step 3: Hand
I used small bolts and a glue gun which provided too much friction and the joints wouldn’t work as intended. Any pressure applied resulted in the perspex fracturing. I decided to remove the joints and have the finger move as one unit.
– Attach the fingers into the slots of the palm cut out. Img[2]
– Attach the servo arm to the smallest disk and bolt the arm to the servo.
– Glue the palm onto the smallest disk to provide the wrist section, add supports for strength.
– Glue the servo to the larger disk with the rectangle cut out , this separates the hand from the lower wrist and allows for 180 degree rotation. Img[3]
Step 4: Wrist Joint
I used Rod bolts as the forearm structure to act as the radius and ulnar. Attach these rods to the wrist joint by drilling two holes in the lower aluminium bracket and tightening them with nuts on either side.
cable tie the leads of the servo to one of the rods.
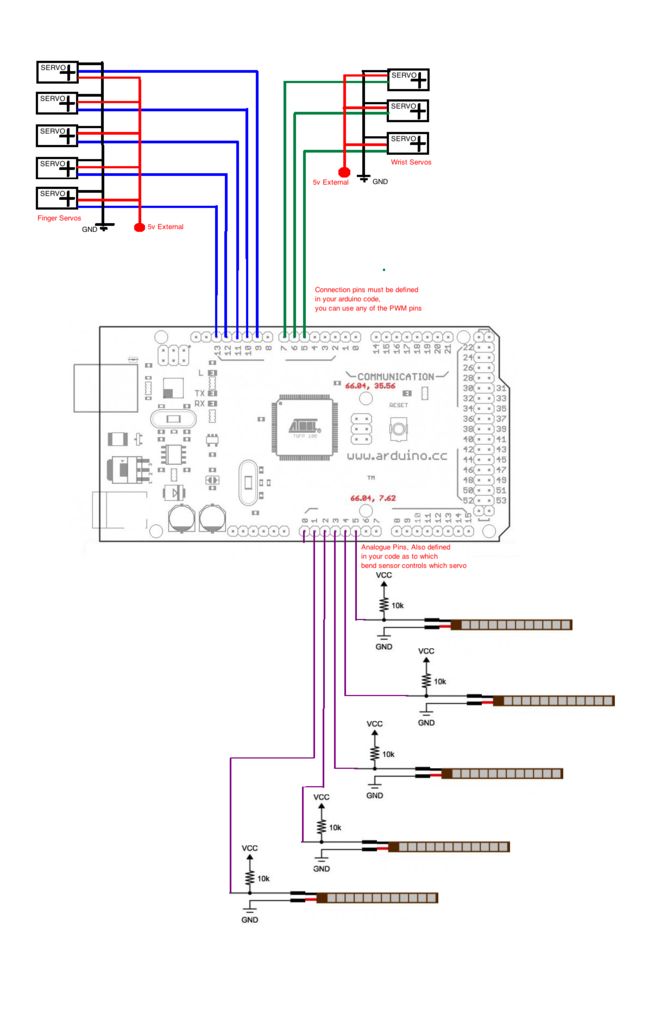
- How does the user control the robotic arm?
The user wears a glove containing a gyroscope and bend sensors that translate hand movement into servo motion. - What material was used for the finger cutouts?
Perspex was used because it was available, though Aluminium is recommended as it is stronger. - Does the hand have full finger articulation?
No, finger movement is limited because the brittle Perspex material caused fractures under pressure. - What provides haptic feedback when grasping objects?
Touch sensitive resistors located in the fingers provide feedback to indicate when an object is grasped. - Can this project be built without an Arduino Mega?
Yes, any Arduino with enough Analogue input pins to support all the sensors can be used. - What type of wire connects the servos to the mechanism?
Movement is provided by servos attached to extension wire or piano wire depending on position. - How many degrees of freedom does the wrist joint have?
The wrist acts as a ball joint providing radial deviation, ulnar deviation, flexion, extension, and rotation. - What file format is required for laser cutting the parts?
The design files must be exported in 2d DXF format if altering the design in SketchUp.