Used Hardware:
Arduino mini Atmega328
Laser
Servo
Dynamo
Battery pack 4 x 1,5 V
 Remove these ads by Signing Up
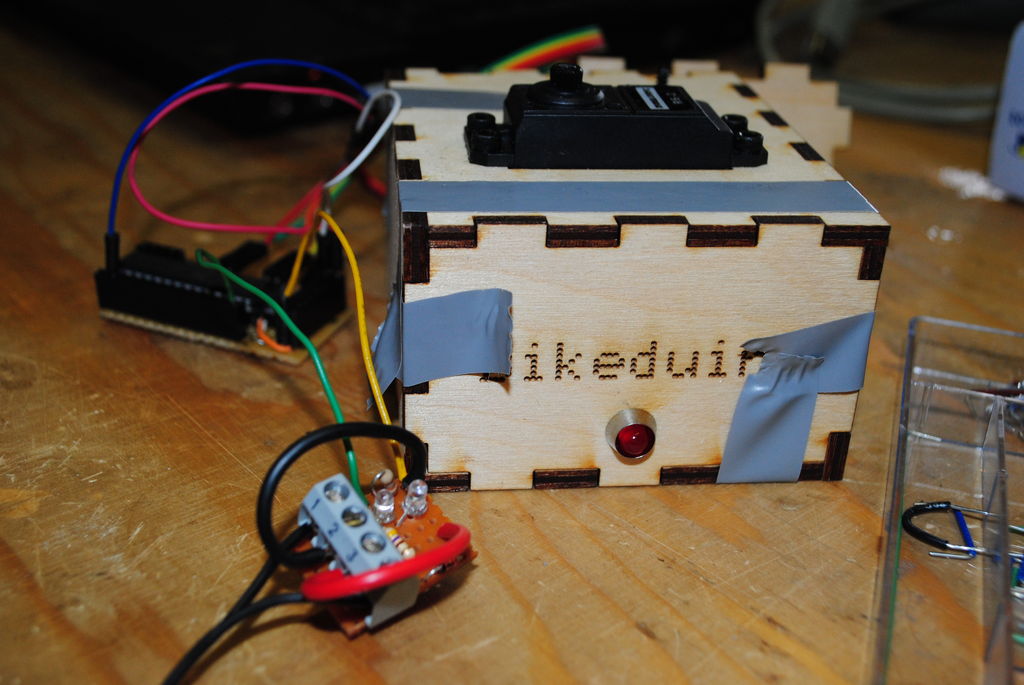
Remove these ads by Signing UpStep 1: 1 Step: Build up an Mini Arduino Board
Step 2: Step 2: Wire the dynamo in order to read the pulses it gives to the Arduino.
For assuring that the dynamo is giving pulses correctly use the osciloscope.
Step 3: Step 2: Process the reading from the Dynamo and get the SPEED , ACCELERATION and DISTANCE
You need to acurate very precisely in counting the pulses and then calbulate the SPEED, ACCELERATION and DISTANCE.
Here you get the code.
// Bikeduino version 1
// Lets your bicycle point a laser at the spot where it will stand still if the deceleration remains constant.
#include <Servo.h>
Servo servo;
// analog pin
#define DYNAMO_PIN 5
// pwm digital pin
#define SERVO_PIN 10
// digital pin
#define LASER_PIN 11
// time sample averaging window
#define WINDOW_SIZE 32
// acceleration averaging window
#define AWINDOW_SIZE 8
// the angle at which servo is pointing horizontally
#define SERVO_STRAIGHT_ANGLE 140
// the amount of milimeters the bike moves in one pulse from the dynamo (measured)
#define mm_per_pulse 16
// the amount of milimeters the laser is above the ground (on the bicycle)
#define bike_height 1030
void setup() {
Serial.begin(19200);
Serial.println(“Bikeduino version 1.”);
servo.attach(SERVO_PIN);
servo.write(SERVO_STRAIGHT_ANGLE);
pinMode(LASER_PIN, OUTPUT);
}
int q[WINDOW_SIZE];
int q_p = 0;
void queue(int x) {
if (++q_p >= WINDOW_SIZE)
q_p = 0;
q[q_p] = x;
}
int average_pulsetime() {
int i;
long r=0;
for (i=0; i<WINDOW_SIZE; i++) {
r += q[i];
}
return (int) (r/WINDOW_SIZE);
}
int aq[AWINDOW_SIZE];
int aq_p = 0;
void aqueue(int x) {
if (++aq_p >= AWINDOW_SIZE)
aq_p = 0;
aq[aq_p] = x;
}
int average_acceleration() {
int i;
long r=0;
for (i=0; i<AWINDOW_SIZE; i++) {
r += aq[i];
}
return (int) (r/AWINDOW_SIZE);
}
void wait_for_pulse() {
/*
while (digitalRead(DYNAMO_PIN)) {
}
while (!digitalRead(DYNAMO_PIN)) {
}
*/
while (analogRead(DYNAMO_PIN) < 300) {
}
while (analogRead(DYNAMO_PIN) > 300) {
}
}
void laser_off() {
digitalWrite(LASER_PIN, LOW);
}
void laser_on() {
digitalWrite(LASER_PIN, HIGH);
}
int v_prev;
unsigned long prev_t;
void loop() {
unsigned long t;
int dt;
wait_for_pulse();
t = millis();
dt = t – prev_t;
queue(dt);
prev_t = t;
dt = average_pulsetime();
int v = (1000*mm_per_pulse)/dt; // [v] = mm/s
int dv = v – v_prev;
v_prev = v;
int a = (int) ((1000*(long)dv) / dt); // acceleration in mm/s^2
aqueue(a);
// Serial.println();
// Serial.print(“a: “);
// Serial.println(a);
a = average_acceleration();
// Serial.print(“t: “);
// Serial.println(t);
// Serial.print(“dt now:”);
// Serial.println(q[q_p]);
// Serial.print(“dt av: “);
// Serial.println(dt);
// Serial.print(“v: “);
// Serial.println(v);
// Serial.print(“a: “);
// Serial.println(a);
if (a == 0) {
// don’t change anything
}
else if (a < 0) {
// we are slowing down, point the laser
laser_on();
int d = (int) (-sq((long) v)/a/2); // distance (mm) until standstill assuming deceleration remains constant
double angle = (180.0/3.1416) * atan((double)bike_height / d); // angle between laser and forward horizontal
servo.write(SERVO_STRAIGHT_ANGLE-angle); // change the minus to a plus if your servo is turned around
// Serial.println();
// Serial.print(“d: “);
// Serial.println(d);
// Serial.print(“angle: “);
// Serial.println(angle);
}
else {
// not slowing down
laser_off();
servo.write(SERVO_STRAIGHT_ANGLE); // point forward
}
}