Tools:
Hot Glue Gun
Laptop with Arduino software
22 awg hookup wire (black, red, yellow)
wire strippers
usb cable
drill
1/16th drillbit
exacto knife
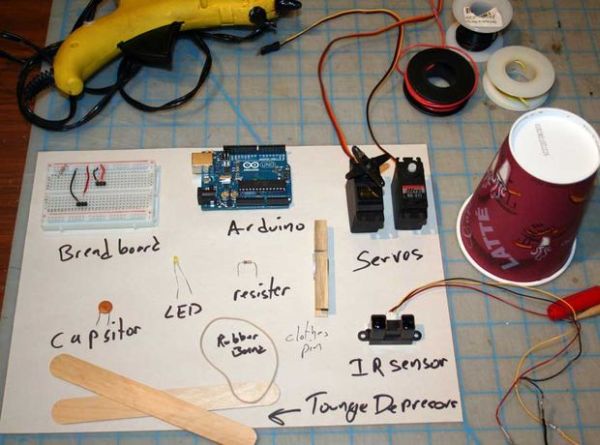
Parts:
2 tongue depressors
1 clothespin
1 rubber-band
1 dart
1 cup (paper or plastic)
1 arduino
1 breadboard
1 led
1 momentary button switch
1 22k ohm resister
1 0.1uf capacitor
1 10k ohm resister
1 infra red sensor
Step 1: Assemble the crossbow
1) hot glue the two tongue depressors together in a T shape.
2) notch the top piece in two places near each edge
3) break a rubberband and tie it in two knots at each of the notches
4) hotglue a clothespin to the back of the T
5) test your crossbow
Step 2: Prepare crossbow for digital control
1) drill a small hole through the back of the clothespin
2) strip a 2 inch piece of hookup wire
3) attach the wire to the clothespin
4) rubberband or hotglue a servo to the bottom of the clothespin
5) attach the wire from the clothespin to the arm of a servo
6) hookup the servo to the breadboard (redwire to power, blackwire to ground)
7) hookup the servo to the arduino (yellow wire to pin 10)
8) power the breadboard from the arduino (5v and ground)
9) hookup a monentary switch from ground on the breadboard to pin 2 on the arduino
10) program the aruduino with the following code
— for more on how to program arduinos; check out this video series http://www.youtube.com/watch?v=fCxzA9_kg6s
11) test the digital dart gun, by pressing the button
/////////////////////////////////////////////////////////////////////////////
//TRIGGER TEST by mdwilson 5/1/2013
#include <Servo.h>
Servo trigger; // create servo object to control a servo
const int buttonPin = 2; // the number of the pushbutton pin
const int ledPin = 13; // the number of the LED pin
int buttonState = 0; // variable for reading the pushbutton status
void setup()
{
pinMode(ledPin, OUTPUT); // initialize the LED pin as an output:
pinMode(buttonPin, INPUT); // initialize the pushbutton pin as an input:
digitalWrite(buttonPin,HIGH);
trigger.attach(10); // attaches the servo on pin 9 to the servo object
trigger.write(0);// set up initial trigger position
}
void loop()
{
// read the state of the pushbutton value:
buttonState = digitalRead(buttonPin);
// if the button is pressed than shoot
if (buttonState == LOW) {
trigger.write(45);//send the trigger servo to 45 degrees
digitalWrite(ledPin, HIGH);// turn on the led
delay(1000); //wait 1 second
trigger.write(0); //send the trigger servo back to 0
digitalWrite(ledPin, LOW); //turn off the led
}
}
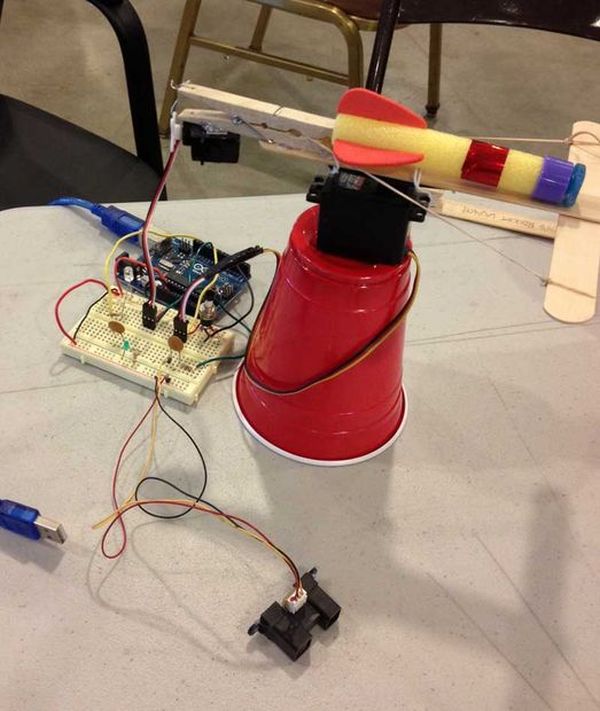
Step 3: Electronics
1) attach another servo (sentry) to bottom of crossbow
2) attach servo (sentry) to breadboard and pin 9 of the arduino
3) attach IR sensor to front of the crossbow
4) attach IR sensor to breadboard (power and ground) and arduino (pin A0)
5) add low pass filter to breadboard using a 0.1 uf capacitor and 22k ohm resistor to clean up the IR signal (if needed).
see attached schematic
if you wanted to use a photoresister instead of an IR sensor, check out this instructable:
http://www.instructables.com/id/Control-Servo-with-Light/
For more detail: How to make a robotic dart shooting sentry