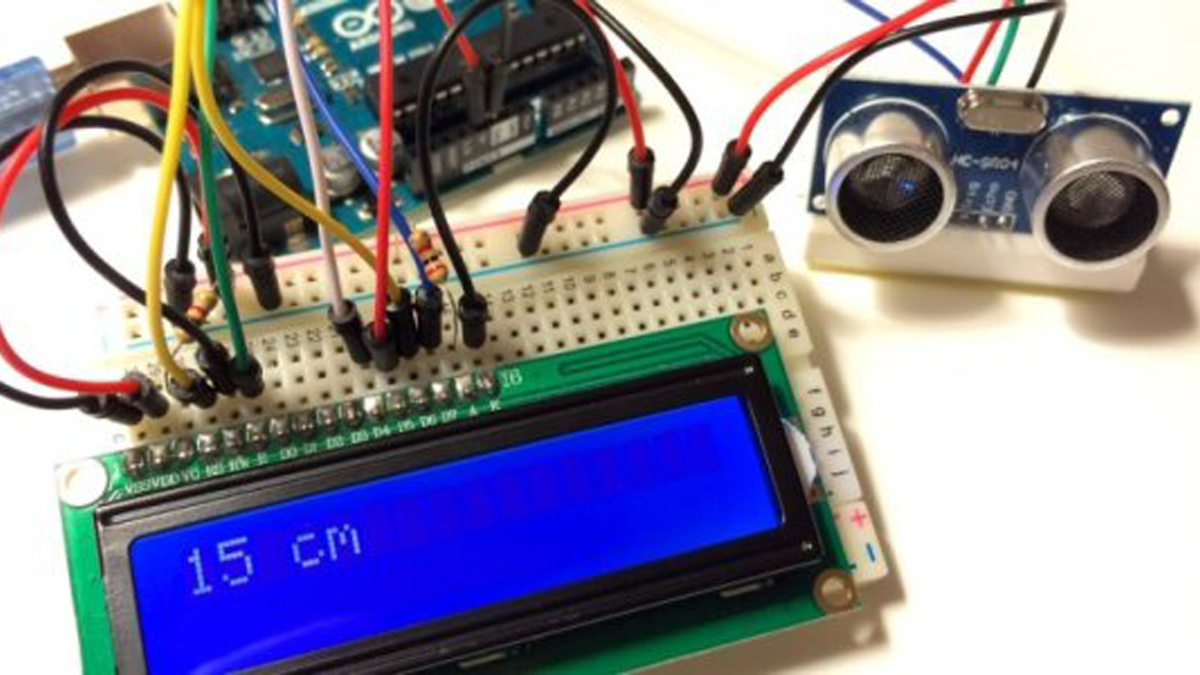
Ultrasonic range finders are fun little modules that measure distance. You can use them to find the distance to an object, or to detect when something is near the sensor like a motion detector. They’re ideal for projects involving navigation, object avoidance, and home security. Because they use sound to measure distance, they work just as well in the dark as they do in the light. The ultrasonic range finder I’ll be using in this tutorial is the HC-SR04, which can measure distances from 2 cm up to 4oo cm with an accuracy of ±3 mm.
In this article, I’ll show you how to make three different range finder circuits for the Arduino. The first range finder circuit is easy to set up, and has pretty good accuracy. The other two are a bit more complicated, but are a bit more accurate because they factor in temperature and humidity. But before we get into that, lets talk about how the range finder measures distance.
The Speed of Sound
Ultrasonic range finders measure distance by emitting a pulse of ultrasonic sound that travels through the air until it hits an object. When that pulse of sound hits an object, it’s reflected off the object and travels back to the ultrasonic range finder. The ultrasonic range finder measures how long it takes the sound pulse to travel in its round trip journey from the sensor and back. It then sends a signal to the Arduino with information about how long it took for the sonic pulse to travel.
Knowing the time it takes the ultrasonic pulse to travel back and forth to the object, and also knowing the speed of sound, the Arduino can calculate the distance to the object. The formula relating the speed of sound, distance, and time traveled is:
Read more: How to Set Up an Ultrasonic Range Finder on an Arduino